Comprobación de la eficiencia de aplicación con pulverizadora utilizando equipamiento de agricultura digital y de precisión y por medio de guía manual
Verifying the efficiency of application with a spray boom using digital and precision agriculture equipment and manual guidance
Hazel Priscilla Garro-Ureña1, Isaac Javier Mora-González2, Natalia Gómez-Calderón3, Oscar Quesada-Chacón4
Fecha de recepción: 29 de febrero, 2024
Fecha de aprobación: 17 de junio, 2024
Garro-Ureña, H.P;Mora-González, I.J; Gómez-Calderón, N; Quesada-Chacón, O. Comprobación de la eficiencia de aplicación con pulverizadora utilizando equipamiento de agricultura digital y de precisión y por medio de guía manual. Tecnología en Marcha. Vol. 38, No 1. Enero-Marzo, 2025. Pág. 78-92. https://doi.org/10.18845/tm.v38i1.7046
https://doi.org/10.18845/tm.v38i1.7046
Palabras clave
Agricultura digital; tecnología; medio ambiente; procesamiento de datos; optimización.
Resumen
La agricultura digital es la evolución de la agricultura de precisión. Dentro de los avances tecnológicos más importantes en la agricultura se pueden encontrar los tractores con piloto automático, que permiten utilizar de una manera más eficiente los recursos. Por tanto, el proyecto validó la eficiencia de aplicación con pulverizadora comparando dos guías del tractor, una con piloto automático Trimble y otra con la guía manual de un operador al aplicar un compuesto a base de boro y penetrante vegetal. Se realizaron tres pases para cada una de las guías y se recopilaron los datos para posteriormente procesarlos y determinar el porcentaje de traslape presente en cada una. Además, se realizaron tres vuelos con dron, con el fin de observar por medio de imágenes multiespectrales los cambios en la vegetación, antes y posterior a la aplicación del compuesto. Con base a ello se logró concluir que, en los pases del tractor con la guía manual del operador, los porcentajes de traslape son mayores en comparación a los obtenidos mediante el uso de la guía del piloto automático. Además, se determinó que los costos del producto y el impacto ambiental aumentan de manera significativa cuando se usa la guía manual del operador en comparación a la guía automatizada. En los índices de vegetación únicamente SAVI mostró cambios significativos, mientras que los índices EVI y AVI no se deben de utilizar en estos casos, ya que presentan datos con una alta variación y una ausencia de estos.
Keywords
Digital agriculture; technology; environmental; data processing; optimization.
Abstract
Digital agriculture is the evolution of precision agriculture. Among the most important technological advances in agriculture, autopilot tractors allow the most efficient use of resources. Therefore, the project aims to validate the efficiency of sprayer application by comparing two tractor guides, one with Trimble autopilot and the other with an operator’s manual guide, when applying a boron-based compound and plant penetrant. Each guide had three passes, collecting data for later processing to determine the percentage of overlap in each. In addition, the team performed three drone flights to capture multispectral images and observe changes in vegetation before and after applying the compound. Based on this, it was concluded that the tractor passes with operator’s manual guidance have a higher overlap percentage than those obtained using the autopilot guide. Moreover, it was determined that product costs and environmental impact increase significantly when manual operator guidance is used compared to automated guidance. In the vegetation indices, only SAVI showed significant changes, while the EVI and AVI indices should not be used in these cases, since they present data with a high variation and an absence of these.
Introducción
La Organización de las Naciones Unidas para la Agricultura y la Alimentación (FAO)[1], menciona un aumento de un 30% en el uso de pesticidas a nivel mundial entre el año 2000 y el 2020. Mientras que el Programa de las Naciones Unidas para el Desarrollo (PNUD) señala altos índices de uso de plaguicidas en Costa Rica, superior a los índices de los países que pertenecen a la Organización para la Cooperación y el Desarrollo Económico (OCDE) de América. El Servicio Fitosanitario del Estado de Costa Rica establece un uso promedio de 11,5 kg por hectárea, sin embargo, el PNUD indica que el promedio entre el año 2012 y 2022 de uso de plaguicidas fue de 34,45 kg por hectárea [2].
Debido al crecimiento de la población mundial, la demanda de alimentos crecerá una tercera parte de la actual para el año 2050. Para lograr satisfacer esta demanda, la agricultura debe adquirir el reto de producir más, con menos recursos, abriendo paso así a la agricultura digital, para así proveer de los alimentos necesarios de una manera más eficiente [3]. El aumento de la población entre el año 2002 y el 2018 fue de un 21%, este aumenta la demanda de alimentos que influye en la intensificación agrícola, que a su vez está asociado a un aumento del uso de plaguicidas [4]. Por esta razón, conforme con el Banco Mundial [5] es necesario que la agricultura se adapte a los cambios tecnológicos, los cuales son necesarios para alcanzar un mayor desarrollo económico y ambiental, y así cumplir con la demanda alimenticia. La agricultura es una de las actividades económicas que más generan impacto ambiental, sin embargo, con el uso de las tecnologías se contribuye a disminuirlo. La automatización en la agricultura permite incrementar la productividad, mejorar la calidad de los productos, el uso eficiente de los recursos, y contribuir en un desarrollo sostenible con el ambiente [6].
La agricultura digital a su vez busca contribuir en el alcance de los objetivos del Desarrollo Humano Sostenible (ODS), específicamente el Objetivo 2 (hambre cero), Objetivo 6 (agua limpia y saneamiento), Objetivo 9 (Industria, innovación e infraestructura) y Objetivo 12 (Producción y consumo responsables). Este proyecto pretende contribuir la meta 12.4, la cual busca “lograr la gestión ecológicamente racional de los productos químicos y de todos los desechos a lo largo de su ciclo de vida, de conformidad con los marcos internacionales convenidos, y reducir significativamente su liberación a la atmósfera, el agua y el suelo a fin de minimizar sus efectos adversos en la salud humana y el medio ambiente” [7].
Por consiguiente, el proyecto se enfocará en la recopilación de datos de la aplicación de una mezcla a base de boro y penetrante vegetal como identificador visual, que además simule la aplicación de herbicida mediante la utilización de una pulverizadora suspendida, comparando los rendimientos de aplicación utilizando el piloto automático y la guía manual del operador para un tractor agrícola categoría II.
Materiales y métodos
La evaluación de la eficiencia de la pulverizadora con piloto automático se realizó en el campo de Laboratorio de Maquinaria Agrícola de la Escuela de Ingeniería Agrícola, del Instituto Tecnológico de Costa Rica, en la Sede Central. El área de estudio presenta una pendiente transversal de 1.72% y longitudinal de 7.76%, con un tipo de suelo arcilloso, el cual fue dividido en dos parcelas experimentales sembradas de pasto estrella (Cynodon nlemfuensis) (Figura 1). Cada parcela experimental fue aplicada con una mezcla de compuesto de boro y penetrante vegetal como indicador visual con tres pases en paralelo a la pendiente haciendo uso de la pulverizadora en cada pase, grabando el recorrido y comparar las áreas cubiertas utilizando guía automática y guía manual. La operación se replicó tres veces, con dos pases de control sin el producto y uno con la aplicación de la mezcla.
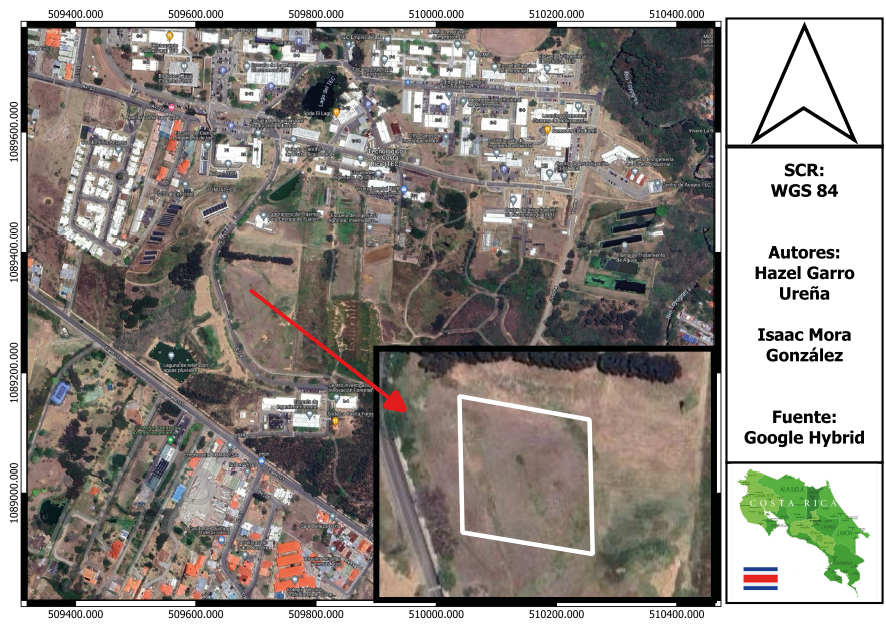
Figura 1. Área experimental para la prueba con pulverizadora.
Delimitación del área experimental
La delimitación de las dos parcelas experimentales se realizó mediante la colocación de marcadores de campo. En la parcela en la que se utilizó la guía manual del operador, se colocaron 4 marcadores de campo espaciados a 9.60m, equivalentes al ancho de trabajo de la pulverizadora, que delimitaron cada pase, para indicarle al operador el ancho de trabajo. Mientras que en la guía con piloto automático se colocaron únicamente dos marcadores con un espacio entre ellos de 28.80m, equivalentes a los 3 pases, ya que en esta guía no se requiere las marcas en campo que delimitan cada pase, dado que el acomodo del tractor en cada uno se realizó con la ayuda del piloto automático.
Características del equipo utilizado
Se realizó el levantamiento topográfico de las estacas colocadas en la delimitación del área con el uso de GNSS-RTK marca Geomax, para contar con el área georreferenciada y determinar la pendiente promedio del área de estudio. Las capturas de las imágenes multiespectrales se realizaron con un vehículo aéreo no tripulado -VANT- DJI Matrice-300 RTK, equipado con una cámara multiespectral modelo MicaSense. Además, se utilizó un sistema de piloto automático RTK Trimble GFX-750. La aplicación de la mezcla del compuesto a base de boro y penetrante vegetal y los pases de control se realizaron con el tractor SAME-Explorer 75 (Cuadro 1) y una pulverizadora Montana 400-TLP (Cuadro 2). La parametrización del sistema de piloto automático se muestra en la Figura 2.
Cuadro 1. Especificaciones del tractor.
|
SAME Explorer 75 |
|
|---|---|
|
Categoría |
2 |
|
Potencia (HP) |
75 |
|
Toma de fuerza |
540 rpm |
Cuadro 2. Especificaciones de la pulverizadora.
|
Marca y modelo |
Montana 400-TLP |
|---|---|
|
Ancho de trabajo (m) |
9,60 |
|
Ancho de transporte (m) |
2,10 |
|
Cantidad de boquillas |
20 |
|
Modelo de boquilla |
Magnum 11003-BD |
|
Espaciado entre boquillas (m) |
0,5 |
|
Tipo de enganche |
Tres puntos |
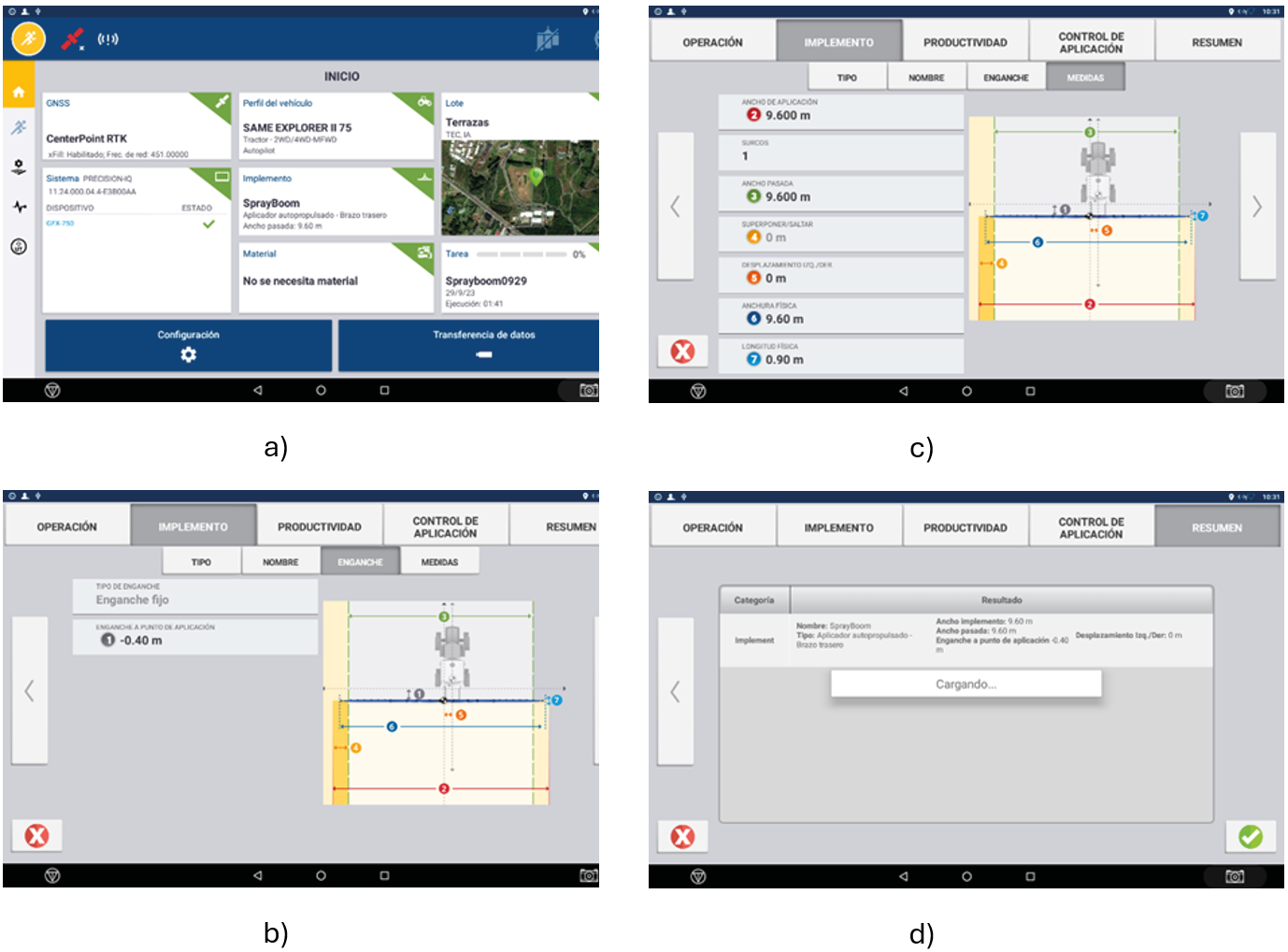
Figura 2. Parametrización de la tarea en el sistema de piloto automático del tractor (a) y del implemento pulverizador utilizado (b, c y d)
Procedimiento experimental
Una vez establecido el diseño experimental se establecieron puntos fijos georreferenciados con RTK en el área de estudio, para dividir las dos parcelas propuestas y ubicar el punto en donde se colocó la base del piloto automático y la antena RTK del VANT. Los pases con la guía del piloto automático se realizaron con la función de línea A-B integrada dentro del software del piloto automático Trimble GFX-750, la cual permite definir la ruta que seguirá el tractor (Figura 3 y Cuadro 3). En la guía manual con operador, se colocaron conos de seguridad sobre los marcadores de campo con el fin de resaltar el inicio y fin de cada uno de los pases. Asimismo, se colocaron en los marcadores de campo, cuerda para la simulación de eras de cultivo, contemplando el ancho de trabajo de la pulverizadora, en los pases con la guía manual del operador (Figura 3). Las especificaciones del vuelo se muestran en el Cuadro 4.
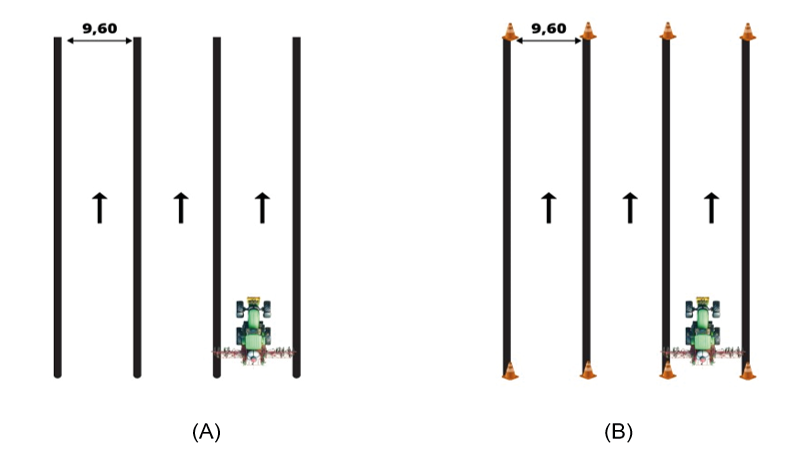
Figura 3. Diseño experimental de las pruebas con la guía del sistema de piloto automático (A) y con la guía manual (B).
Cuadro 3. Especificaciones del diseño experimental a seguir con la guía del sistema de piloto automático para cada parcela.
|
Piloto automático |
Operador |
|
|---|---|---|
|
Cantidad de pases |
Tres |
Tres |
|
Aplicación del producto |
Una |
Una |
|
Repeticiones de control |
Dos |
Dos |
|
Velocidad de avance del tractor |
2.02 km/h |
2.02 km/h |
|
Revoluciones del tractor |
2200rpm |
2200rpm |
|
Marcha y gamma del tractor |
3L |
3L |
|
Altura de la pulverizadora |
50 cm |
50 cm |
|
Presión de la bomba |
25-50 psi |
25-50 psi |
|
Dirección de pase |
Norte-Sur, a favor de pendiente |
Norte-Sur, a favor de pendiente |
|
Captura de imagen multiespectral |
A una altura de vuelo de 80 m, se realizaron 3 vuelos de captura de imágenes con VANT equipado con cámara multiespectral, antes de la aplicación de la mezcla del compuesto a base de boro y penetrante vegetal, una semana después y dos semanas después. |
A una altura de vuelo de 80 m, se realizaron 3 vuelos de captura de imágenes con VANT equipado con cámara multiespectral, antes de la aplicación de la mezcla del compuesto a base de boro y penetrante vegetal, una semana después y dos semanas después. |
Cuadro 4. Especificaciones del VANT y cámara multiespectral para la captura de imágenes.
|
Altura del vuelo (m) |
80 |
|---|---|
|
Velocidad horizontal del vuelo (m/s) |
3,9 |
|
Superposición |
75 % |
|
Tamaño del pixel (cm/pixel) |
3.79 |
|
Tamaño del sensor (mm) |
Anchura: 5.04 Altura: 3.78 |
Una vez realizados los pases con el tractor en el área experimental, se descargaron los datos obtenidos con el piloto automático para analizar las áreas de aplicación, traslapes de la pulverizadora y tiempos de duración. Mediante los softwares Trimble AG y QGis, se determinaron las áreas parciales de cada una de las pasadas con los equipos, y el área total de trabajo realizado, para obtener el porcentaje de traslape que presenta, tanto en los pases con piloto automático como los realizados mediante la guía manual del operador. Además, con esta información de áreas se determinó el coeficiente de uniformidad de aplicación según [10] y rendimiento del equipo al realizar aplicaciones con la guía del piloto automático y con la guía del operador.
Por otro lado, basado en los tiempos de aplicación y el área cubierta, se determinaron los costos asociados a la cantidad de producto aplicado, así como el costo económico del uso de la maquinaria necesaria para realizar la aplicación con pulverizadora y se hizo una estimación del impacto ambiental causado, utilizando método de arboleda [11].
Obtención de índices de vegetación
Se obtuvieron los índices de vegetación para el área de estudio antes de la aplicación de la mezcla, 8 días después y 15 días después. Se utilizaron índices de vegetación que se muestran a continuación, con su respectiva ecuación obtenida de [10]:
1.1.1. Índice de vegetación resistente a la atmosfera (ARVI):
 Ecuación 1
Ecuación 1
١.١.٢. Índice de vegetación avanzada (AVI):
 Ecuación 2
Ecuación 2
١.١.٣. Índice de vegetación mejorado (EVI):
 Ecuación 3
Ecuación 3
1.1.4. Índice de clorofila (GCI):
 Ecuación 4
Ecuación 4
1.1.5. Índice de vegetación de la diferencia normalizada verde (GNDVI):
 Ecuación 5
Ecuación 5
1.1.6. Índice de vegetación diferenciada normalizada (NDVI):
 Ecuación 6
Ecuación 6
1.1.7. Índice de contenido de clorofila en la vegetación (NPCRI):
 Ecuación 7
Ecuación 7
1.1.8. Índice de vegetación ajustado al suelo (SAVI):
 Ecuación 8
Ecuación 8
1.1.9. Índice de pigmento insensible a la estructura (SIPI):
 Ecuación 9
Ecuación 9
1.1.10. Índice de vegetación de diferencia normalizada Red Edge (NDVI REDEDGE):
 Ecuación 10
Ecuación 10
1.1.11. Índice de diferencia normalizada al borde rojo (NDRE):
 Ecuación 11
Ecuación 11
Procesamiento de datos
Para conocer los tiempos de duración, velocidades de avance y áreas de cada pasada se descargó la información que brinda el piloto automático mediante la aplicación de Trimble AG. Estos datos fueron analizados tanto en QGis, para la creación de mapas de pases y de traslape, como en Excel para determinar el porcentaje de traslape y eficiencia de aplicación. Con el resultado de las imágenes se creó el mapa de imágenes multiespectrales, mediante QGIS, previo a la aplicación de la mezcla del compuesto y posterior. Finalmente, con la información recopilada se realizó un análisis de varianza mediante el software InfoStat para la confección de análisis de varianzas (ANOVAS) para medir la uniformidad y eficiencia de aplicación entre las dos parcelas. De esta manera se hicieron las comparaciones y recomendaciones validadas a los productores agrícolas y se determinó el impacto ambiental y económico de la aplicación con pulverizadora en la guía manual del operador y con piloto automático. La generación de los gráficos de los índices de vegetación se realizó con el software R Studio.
Resultados
En la Figura 4 se muestra la cobertura de los tres pases con la pulverizadora en las parcelas experimentales. En la comparación de los porcentajes de traslape para los dos pases de control realizados y el pase para la aplicación de la mezcla del compuesto a base de boro y penetrante vegetal (Figura 5), se observa como en los tres casos, al realizar los pases del tractor con la guía manual del operador, los porcentajes de traslape son mayores en comparación a los porcentajes de traslape obtenidos por medio de los pases realizados mediante el uso de la guía del piloto automático. La diferencia entre la guía manual y la guía automática para el pase de control 1 es de 1.8%, para el pase de control 2 es de 0.9%, mientras que para el pase de la aplicación del producto es de un 1.8%.
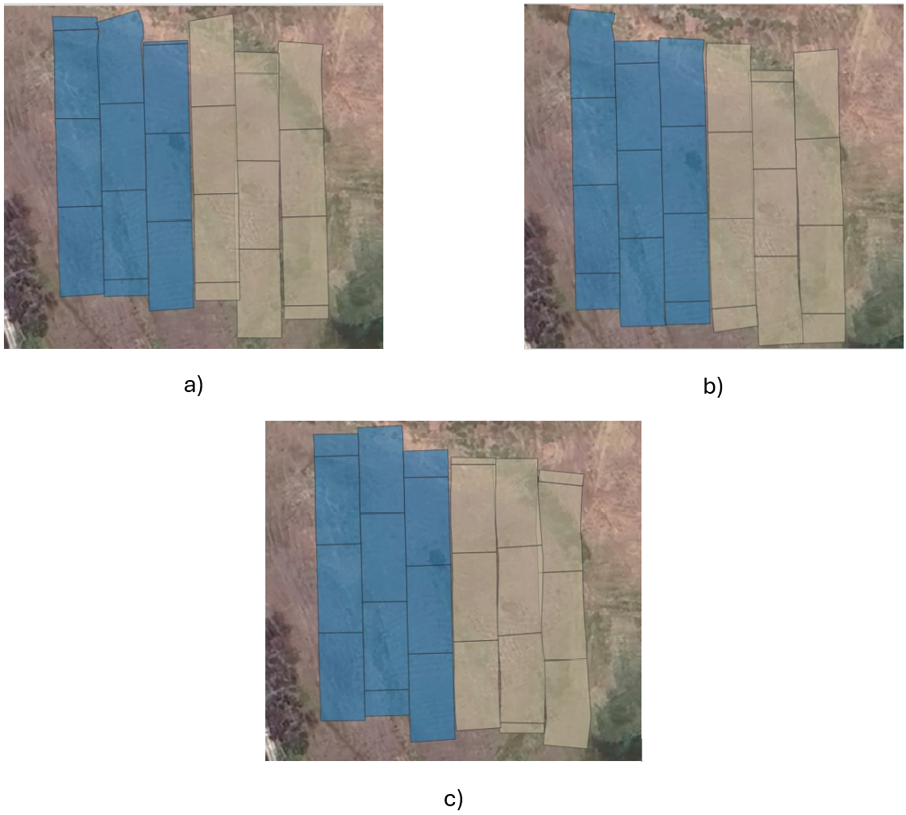
Figura 4. Áreas experimentales aplicadas en las pruebas (a y b) y con la mezcla de boro y aceite vegetal (c).

Figura 5. Comparación del porcentaje de traslape entre la guía manual y la guía automática del tractor.
La Figura 6 muestra las áreas (m2) en las cuales no hubo aplicación de la mezcla del compuesto a base de boro y penetrante vegetal. De igual manera que en el porcentaje de traslape, se observa que la diferencia entre los pases realizados por medio de la guía manual del operador en comparación a los pases realizados por medio de la guía del piloto automático presenta variaciones significativas en las áreas que no fueron aplicadas por el producto. En este caso para la guía con el piloto automático las áreas sin aplicación fueron menores en comparación a las áreas sin aplicación obtenidas en los pases con la guía manual del operador.

Figura 6. Comparación de las áreas sin aplicación entre la guía manual y la guía automática del tractor.
En referencia al aspecto económico, en la Figura 7 se puede notar como en la guía del tractor por medio del uso del piloto automático los costos en porcentaje del producto aplicado son menores, sin embargo, el costo por el uso del tractor (Figura 8) en los pases realizados mediante la guía automatizada por medio del piloto automático fueron mayores en dos de los tres pases realizados, en comparación a los costos obtenidos en la guía manual por medio de un operador. Esto debido a que las dimensiones de las áreas no son exactamente iguales, sin embargo, el costo del uso del tractor no se ve influenciado por el uso del piloto automático, ya que con y sin piloto automático el promedio de la velocidad en las dos áreas experimentales es la misma. Basado en la Figura 7 la diferencia en el costo del producto traslapado para el pase de control 1 es de 0.72 %, para el pase de control 2 es de 0.39 % y para el pase de la aplicación de boro la diferencia fue del 0.73 %. Por otro lado, en relación con el costo del uso del tractor (Figura 8), para el pase de control 1, la diferencia es de 0.03 %, para el pase de control 2 es de 0.03%, mientras que para el pase para la aplicación de boro la diferencia fue del 0.13 %. De los anterior se puede observar que la diferencia es mayor en la comparativa de los costos asociados a la aplicación del producto, que en la diferencia de los costos asociados al uso del tractor.
Cabe destacar, que, dentro de los cálculos realizados para obtener el costo del producto aplicado, se tomó en cuenta un costo del agua de $ 0.0018 por litro, según lo establece SENARA para la utilización de agua para riego agrícola.

Figura 7. Comparación de los costos del producto aplicado mediante la guía manual y la guía automática.

Figura 8. Comparación de los costos por uso del tractor mediante la guía manual y la guía automática.
Con respecto a la evaluación del impacto ambiental realizada se obtuvo que los factores ambientales que se ven afectados en la aplicación con pulverizadora son el suelo, biótico, socioeconómico, agua y aire. En la Figura 9 y Figura 10 se evidencia los resultados obtenidos en la evaluación realizada a la aplicación con la guía manual del operador y la guía con piloto automático, respectivamente. Se destaca en el factor suelo la única diferencia entre ambos métodos de guía del tractor, ya que la importancia del impacto ambiental para el suelo en los pases realizados con la guía manual del operador se clasifica como de importancia moderada, mientras que los pases realizados por medio de la guía automatizada son clasificados como irrelevantes, esto se asocia al porcentaje de traslape obtenido en las pruebas, en donde el mismo fue mayor en los pases con la guía manual del operador, como se evidenció anteriormente, por lo cual se produce una afectación mayor al suelo debido al exceso de producto aplicado.

Figura 9. Evaluación del impacto ambiental para los pases realizados con la guía manual del operador.

Figura 10. Evaluación del impacto ambiental para los pases realizados con la guía del piloto automático.
Obtención de índices de vegetación
A partir de las imágenes multiespectrales se analizaron los índices de vegetación: NDVI, ARVI, SAVI, SIPI, EVI, GCI, GNDVI, NPCRI, NDVI Red Edge, NDRE y AVI. Siendo el índice AVI el único que arrojó datos incompletos los cuales no fueron posibles de procesar, por lo que dicho índice no fue utilizado. Por otra parte, cabe destacar como el índice EVI, presenta mucha dispersión en sus datos, como se observa en la Figura 11 y Cuadro 5, por lo cual también fue descartado. En el Cuadro 4 donde se muestran los promedios, desviación y variación de los índices de vegetación, se nota como el índice SAVI es el único de todos los índices que se procesaron, que muestra diferencias significativas en los datos de los 8 días posteriores a la aplicación, tanto para las áreas traslapadas y las de sin traslape, por lo cual este es el único índice que puede ser utilizado para representar los cambios en la vegetación posterior a la aplicación del compuesto de boro y penetrante vegetal. En los índices, exceptuando AVI, EVI y SAVI, los datos obtenidos a partir de las imágenes multiespectrales de antes de la aplicación, a los 8 días después y a los 15 días después no presentan diferencias significativas, por lo cual no son útiles como indicadores visuales para este proyecto.
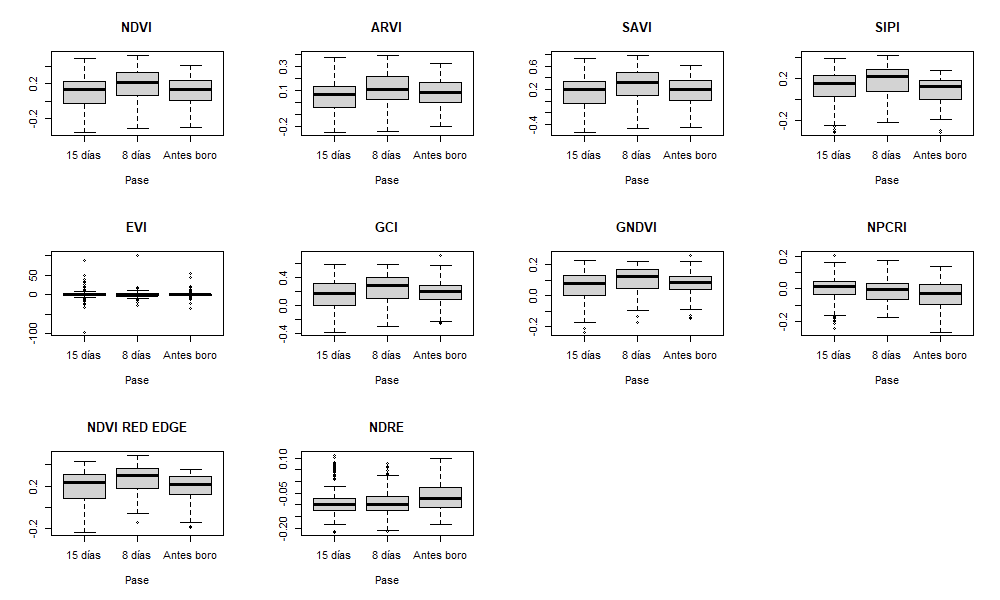
Figura 11. Comparación de la dispersión en los diferentes índices de vegetación utilizados.
Cuadro 5. Promedio, variación y desviación de los índices de vegetación.
|
15 DÍAS |
8 DÍAS |
ANTES |
|||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
Traslape |
Índice de vegetación |
Promedio* |
Desviación estandar |
Varianza |
Promedio* |
Desviación estandar |
Varianza |
Promedio* |
Desviación estandar |
Varianza |
|||
|
CON |
ARVI |
0,142 |
bc |
0,160 |
0,026 |
0,182 |
bc |
0,122 |
0,015 |
0,149 |
bc |
0,117 |
0,014 |
|
CON |
EVI |
-2,146 |
a |
12,125 |
147,023 |
-2,401 |
a |
5,235 |
27,409 |
-0,973 |
ab |
2,141 |
4,582 |
|
CON |
GCI |
0,172 |
bc |
0,227 |
0,051 |
0,252 |
bc |
0,156 |
0,024 |
0,163 |
bc |
0,166 |
0,028 |
|
CON |
GNDVI |
0,068 |
bc |
0,105 |
0,011 |
0,107 |
bc |
0,067 |
0,004 |
0,070 |
bc |
0,075 |
0,006 |
|
CON |
NDRE |
-0,052 |
bc |
0,091 |
0,008 |
-0,060 |
bc |
0,072 |
0,005 |
-0,027 |
bc |
0,070 |
0,005 |
|
CON |
NDVI |
0,199 |
bc |
0,227 |
0,051 |
0,267 |
bc |
0,167 |
0,028 |
0,193 |
bc |
0,169 |
0,029 |
|
CON |
NDVI rd |
0,252 |
bc |
0,156 |
0,024 |
0,326 |
bc |
0,107 |
0,011 |
0,221 |
bc |
0,116 |
0,013 |
|
CON |
NPCRI |
-0,057 |
bc |
0,090 |
0,008 |
-0,058 |
bc |
0,062 |
0,004 |
-0,089 |
bc |
0,072 |
0,005 |
|
CON |
SAVI |
0,298 |
bc |
0,340 |
0,116 |
0,401 |
bcd |
0,251 |
0,063 |
0,290 |
bc |
0,253 |
0,064 |
|
CON |
SIPI |
0,149 |
bc |
0,169 |
0,028 |
0,217 |
bc |
0,135 |
0,018 |
0,109 |
bc |
0,123 |
0,015 |
|
SIN |
ARVI |
-0,002 |
bc |
0,092 |
0,008 |
0,057 |
bc |
0,094 |
0,009 |
0,019 |
bc |
0,086 |
0,007 |
|
SIN |
EVI |
2,246 |
de |
11,924 |
142,192 |
2,565 |
e |
14,793 |
218,823 |
1,085 |
cde |
10,847 |
117,656 |
|
SIN |
GCI |
0,137 |
bc |
0,196 |
0,039 |
0,258 |
bc |
0,215 |
0,046 |
0,224 |
bc |
0,167 |
0,028 |
|
SIN |
GNDVI |
0,056 |
bc |
0,090 |
0,008 |
0,106 |
bc |
0,089 |
0,008 |
0,096 |
bc |
0,067 |
0,004 |
|
SIN |
NDRE |
-0,108 |
bc |
0,022 |
0,000 |
-0,110 |
bc |
0,025 |
0,001 |
-0,097 |
bc |
0,039 |
0,002 |
|
SIN |
NDVI |
0,031 |
bc |
0,152 |
0,023 |
0,115 |
bc |
0,148 |
0,022 |
0,049 |
bc |
0,127 |
0,016 |
|
SIN |
NDVI rd |
0,136 |
bc |
0,141 |
0,020 |
0,221 |
bc |
0,129 |
0,017 |
0,144 |
bc |
0,135 |
0,018 |
|
SIN |
NPCRI |
0,046 |
bc |
0,038 |
0,001 |
0,021 |
bc |
0,040 |
0,002 |
0,020 |
bc |
0,060 |
0,004 |
|
SIN |
SAVI |
0,046 |
bc |
0,228 |
0,052 |
0,172 |
bc |
0,223 |
0,050 |
0,074 |
bc |
0,190 |
0,036 |
|
SIN |
SIPI |
0,076 |
bc |
0,135 |
0,018 |
0,136 |
bc |
0,131 |
0,017 |
0,069 |
bc |
0,108 |
0,012 |
* Para cada índice de vegetación, letras iguales no presentan diferencias estadísticamente significativas (p>0.05) según la prueba de Tukey.
Tal y como lo se menciona en [12] y [13], la distribución de los datos es un factor a considerar debido a que los cuantiles 25 y 75, valores mínimos o máximos podrían correlacionar con algunas otras variables al hacer el análisis de índices de vegetación. Como recomendación para futuras evaluaciones de pases de maquinaria agrícola, se recomienda considerar aspectos agronómicos de la cobertura sobre la que se hagan los estudios y descartar índices previamente evaluados en este proyecto. La metodología de evaluación del traslape por medio de índices de vegetación es válida cuando se presenten diferencias significativas entre índices evaluados.
Conclusiones
Existe una mayor diferencia en el área traslapada cuando se hace uso de la guía manual del operador con respecto a cuando se hace uso de la guía automatizada por medio del piloto automático.
Los costos de la aplicación debido a la cantidad del producto utilizado son menores cuando se utiliza la guía automatizada del tractor en comparación a la guía manual del operador. Por otro lado, los costos obtenidos relacionados al uso del tractor son mayores en los pases con la guía automatizada que los obtenidos con la guía manual. Sin embargo, la diferencia entre los costos relacionados al uso del tractor entre la guía manual y la guía automatizada no es significativa, como si lo es en los costos del producto.
En el aspecto ambiental no hay grandes diferencias entre las guías realizadas, las únicas diferencias que se destacan son las relacionadas al factor suelo, en donde se clasifica como de importancia moderada el impacto ambiental generado en los pases por medio de la guía manual, mientras que en la guía automatizada este factor se clasificó como de importancia irrelevante.
El índice de vegetación que se debe utilizar para notar los cambios realizados por el producto sobre la vegetación presente en las parcelas experimentales es el índice SAVI. Además, los índices NDVI, ARVI, SIPI, GCI, GNDVI, NPCRI, NDVI Red Edge y NDRE no presentan diferencias significativas en las imágenes capturadas antes de la aplicación, 8 días después y 15 días después de la aplicación, para considerarse como un buen indicador visual para este tipo de aplicación. La metodología utilizada es válida para evaluar la eficiencia de la aplicación con pulverizadora, cuando los índices de vegetación muestren diferencias significativas con respecto a otros en el mismo tiempo del estudio de las imágenes multiespectrales.
Agradecimientos
A la Vicerrectoría de Investigación y Extensión (VIE) del Instituto Tecnológico de Costa Rica por promover la investigación estudiantil, a la Escuela de Ingeniería Agrícola del Instituto Tecnológico de Costa Rica, a las empresas CRAISA y GEOINN por su colaboración con la academia y a Guillermo Navarro Martínez por su ayuda en la operación de los equipos.
Referencias
[1] FAO, «Statistical Yearbook,» Roma, 2022.
[2] E. Vargas Castro, «Uso aparente de plaguicidas en la agricultura de Costa Rica,» Programa de las Naciones Unidas para el Desarrollo, Costa Rica, 2021.
[3] N. Gómez , K. Villagra y M. Solorzano , «La labranza mecanizada y su impacto en la conservación del suelo (revisión de literatura),» Tecnología en marcha, vol. 31, nº 1, 2018.
[4] M. Hernández y N. Chavez, «PNUD,» 2022. [En línea].
[5] Banco Mundial, «Banco Mundial,» 2019. [En línea].
[6] FAO, «Organización de las Naciones Unidas para la Alimentación y la Agricultura,» 2022. [En línea]. Available: https://www.fao.org/3/cb9479es/online/cb9479es.html.
[7] Objetivos de Desarrollo Sostenible, «ODS,» [En línea]. [Último acceso: 2023].
[8] N. Gomez, F. Watson y M. Solórzano, «Importancia de los coeficientes de uniformidad en las operaciones agrícolas asistidas por maquinaria (Nota técnica),» Tecnología en marcha, vol. 36, nº 1, pp. 163-177, 2023.
[9] L. Martínez, «Análisis comparativo entre el Método Leopold y el EPM-Arboleda para la identificación de impactos ambientales en la intervención de vías principales urbanas,» Bucaramanga, 2020.
[10] V. Henrich, G. Krauss, C. Götze y C. Sandow, «Indexdatabase,» 2012. [En línea]. Available: https://www.indexdatabase.de/db/i.php?&order=-name.
[11] A. Madriz, «Costa Rica: el país verde qe urge de un monitoreo de plaguicidad altamente peligrosos.,» La República, 2022.
[12] Watson-Hernández, F., Gómez-Calderón, N., & da Silva, R. P. (2022). Oil Palm Yield Estimation Based on Vegetation and Humidity Indices Generated from Satellite Images and Machine Learning Techniques. AgriEngineering, 4(1), 279–291. https://doi.org/10.3390/agriengineering4010019
[13] Tan, C., Zhou, X., Zhang, P., Wang, Z., Wang, D., Guo, W., & Yun, F. (2020). Predicting grain protein content of field-grown winter wheat with satellite images and partial least square algorithm. PLOS ONE, 15(3), e0228500. https://doi.org/10.1371/journal.pone.0228500
Declaración sobre uso de Inteligencia Artificial (IA)
El autor aquí firmante declara que no se utilizó ninguna herramienta de IA para la conceptualización, traducción o redacción de este artículo.
1 Instituto Tecnológico de Costa Rica. Costa Rica.
 prisci03gu20@estudiantec.cr
prisci03gu20@estudiantec.cr https://orcid.org/0000-0003-3137-6468
https://orcid.org/0000-0003-3137-64682 Instituto Tecnológico de Costa Rica. Costa Rica.
ijmora44@estudiantec.cr https://orcid.org/0009-0005-2777-78693 Escuela de Ingeniería Agrícola. Instituto Tecnológico de Costa Rica. Costa Rica.
ngomez@itcr.ac.cr https://orcid.org/0000-0001-7961-75294 Escuela de Ingeniería de Biosistemas, Universidad de Costa Rica, Costa Rica.
oscar.quesadachacon@ucr.ac.cr https://orcid.org/0009-0006-6816-162X