Diseño de sistema para la deposición de una feromona ferromagnética desde un robot móvil para robótica de enjambres
Design of a deposition system for a ferromagnetic pheromone from a mobile robot for swarm robotics
Daniel Monge-Chaves1, Juan Carlos Brenes-Torres2, Cindy Calderón-Arce3
Fecha de recepción: 20 de abril, 2023
Fecha de aprobación: 21 de setiembre, 2023
Monge-Chaves, D; Brenes-Torres, J.C; Calderón-Arce, C. Diseño de sistema para la deposición de una feromona ferromagnética desde un robot móvil para robótica de enjambres. Tecnología en Marcha. Vol. 37, No 2. Abril-Junio, 2024. Pág. 109-120. https://doi.org/10.18845/tm.v37i2.6704
https://doi.org/10.18845/tm.v37i2.6704
Palabras clave
Feromona; estigmergia; ferrofluido; robótica de enjambres; Robotino.
Resumen
En este artículo se muestra el diseño, la implementación y validación de un sistema de deposición de una feromona ferromagnética. El trabajo surge de la necesidad de implementar un método de comunicación bio inspirado, como lo son las feromonas, en un enjambre de robots móviles. Esto para lograr un comportamiento colectivo coordinado por medio de la interacción entre diversos robots. El sistema diseñado logra la deposición de gotas de feromona de 6mm de diámetro con un error del 1.5% y con un tiempo de magnetización de hasta 30 minutos, a través de un robot denominado Robotino.
Keywords
Pheromone; stigmergy; ferrofluid; swarm robotics; Robotino.
Abstract
This paper presents the design, implementation, and validation of a deposition system for a ferromagnetic pheromone. The project originates from the necessity of a bio-inspired communication method, like pheromones, on a swarm of mobile robots. This was desired to achieve a collective behavior due to the interaction of several robots. The designed system was able to deposit pheromone drops of 6mm in diameter, with a 1.5% error and a magnetization time of 30 minutes, by using a Robotino robot.
Introducción
Con el objetivo de crear e implementar sistemas para planificar y obtener rutas óptimas en escenarios estáticos y dinámicos, se han desarrollado proyectos que buscan contribuir con el acceso y/o evacuación en situaciones de desastre, como lo son los derrumbes o incendios. Tal es el caso de la secuencia de proyectos denominada PROE (Planificación de rutas por medio de enjambres de robots) la cual procura la utilización de comportamientos colectivos y coordinados por medio de la interacción entre varios robots [1].
La comunicación entre robots puede ser llevada a cabo de forma directa o indirecta. La comunicación directa es aquella en la cual la transmisión y recepción de datos se da en intervalos tan cortos que se consideran simultáneos. Este tipo de comunicación requiere de una base central que se encargue de coordinar los mensajes, lo cual va en contra del objetivo de comunicación descentralizada que se busca mediante los enjambres robóticos [2].
Por su parte, la comunicación indirecta es aquella en que el envío y la recepción del mensaje se dan en instantes distintos. Como parte de los mecanismos de comunicación indirecta empleados en la robótica de enjambres, con base en fenómenos de la naturaleza, se encuentra el fenómeno de las feromonas [3]. En la robótica de enjambres el uso de feromonas permite a los elementos robóticos conocer cuándo un robot o elemento móvil transitó la zona que se está recorriendo. De este modo, se logra una comunicación indirecta entre los distintos elementos que componen el sistema robótico para obtener un nivel de coordinación entre estos y así lograr tareas como la de optimización y planificación de rutas. Este mecanismo se ha considerado como el nominal en robótica de enjambres, pues es consistente con el objetivo de comunicación descentralizada que buscan dichos sistemas y permite la transmisión de información de un elemento a otro del enjambre, pero con diferencias temporales entre el momento de recepción y de envío del mensaje [2].
En ese sentido, Brenes-Torres et al. [4] proponen la utilización de una sustancia ferromagnética fácilmente dispensable, medible con sensores de fácil acceso y bajo costo, amigable con el medio ambiente y que además cumple con las características de localidad, difusión y evaporación buscadas en una feromona. Dicha sustancia no ha sido implementada en sistemas robóticos reales, por lo que este trabajo pretende dar a conocer los resultados de la implementación de la feromona ferromagnética en un robot denominado Robotino, así como el diseño y la adaptación de sistema de deposición de la feromona.
Robotino es una plataforma robótica móvil de la marca alemana Festo, desarrollada para la investigación y la educación, ver Figura 1. Con un accionamiento omnidireccional, sensores, interfaces y extensiones específicas para aplicaciones. Robotino puede utilizarse, en aplicaciones individuales, de forma muy flexible por medio de lenguajes y sistemas de programación disponibles en la comunidad científica. El accionamiento omnidireccional permite que el Robotino se mueva holonómicamente en el plano [5].

Figura 1. Robot móvil Robotino de Festo.
Por otro lado, la inteligencia de enjambres se refiere al sofisticado comportamiento colectivo que puede surgir de la combinación de muchos individuos simples, cada uno operando de forma autónoma. En la robótica este tipo de inteligencias se conoce como robótica de enjambres, la cual es un nuevo enfoque para la coordinación de gran número de robots relativamente sencillos, autónomos, no controlados de forma centralizada, capaces de tener comunicación local y que operan con un cierto sentido de inspiración biológica [6,7].
Cuando una tarea requiere de cooperación entre robots o agentes es necesario que se dé una comunicación entre los elementos que la van a llevar a cabo. La comunicación implícita es uno de los métodos de comunicación a través del entorno. Las feromonas son un tipo implícito de dicha comunicación. Un nivel superior de feromonas llamado “feromona virtual” se ha introducido en distintos trabajos emulando la comunicación y realizando coordinaciones sencillas para lograr resultados a gran escala en las áreas de vigilancia, reconocimiento, detección de peligros y búsqueda de rutas [8]. Por su parte, la comunicación explícita es el tipo de comunicación en la que los robots se transmiten directamente mensajes entre sí y/o al operador humano [9].
Las feromonas son uno de los medios de comunicación más efectivos ampliamente utilizados por los animales [10]. Estos a menudo usan feromonas para transmitir señales que sirven para la organización social (reconocimiento de los miembros de una misma familia, parentesco o colonia), comportamiento territorial, búsqueda y elección de pareja, envío de mensajes de alarma y coordinación de comportamientos colectivos complejos. Un ejemplo típico de tal coordinación es el comportamiento de forrajeo de las hormigas, como el que se muestra en la Figura 2. Al llevar comida de una fuente al nido, las hormigas dejan un rastro de feromonas para indicar el camino a la comida. El olor de feromonas determina que las otras hormigas ajusten su comportamiento y sigan el rastro existente, reforzándolo, depositando feromona adicional a lo largo del camino, en un proceso auto catalítico [11].

Figura 2. Hormigas siguiendo un sendero por medio de feromonas.
Las feromonas en la naturaleza presentan tres características intrínsecas [2]: (i) Localidad: depende de las condiciones ambientales locales y además están en una posición estática dentro del espacio físico. (ii) Difusión: pueden difundirse formando un gradiente de su densidad. (iii) Evaporación: los niveles de concentración de la feromona deben decaer como una función del tiempo.
La implementación de las feromonas dentro de la robótica de enjambres ha sido tema de interés para múltiples investigaciones a lo largo del orbe. Salman et al. [12] presentan la implementación de un proyecto nombrado Phormica, en el cual el suelo del entorno fue recubierto previamente con una sustancia fotocromática de color blanco que cambia a magenta cuando se ilumina con luz UV. El color de la sustancia decae gradualmente hasta convertirse en blanco una vez retirada la luz UV.
Por otro lado, Fujisawa et al. [13] llevaron a cabo una implementación con vapor de etanol. La principal desventaja de este tipo de implementaciones consiste en que, debido al comportamiento turbulento propio de los gases, las mediciones de concentración son muy variables por lo que es difícil poder definir umbrales de concentración adecuados para la detección. También, debido a las características propias del material, la evaporación de la sustancia se da de manera muy rápida por lo cual, el tiempo de efectividad de esta en el entorno es muy bajo.
Si bien se han llevado a cabo diversas implementaciones de feromonas en sistemas robóticos, no se ha encontrado evidencia de trabajos basados en feromonas para robótica de enjambres enfocados en la deposición de estas en ambientes no controlados, esto constituye el enfoque principal del presente trabajo. Este trabajo considera el diseño y la implementación de un sistema de bombeo hidráulico para la deposición de la feromona ferromagnética desde el robot móvil Robotino de Festo.
En los fluidos magnéticos el efecto neto del campo magnético adquirido por el ferrofluido no varía, a menos que la sustancia sufra algún tipo de movimiento mecánico que rompa la alineación de las partículas, por ejemplo, la agitación. En la feromona ferromagnética propuesta en [4], se implementó la agitación mediante un fenómeno amigable con el ambiente como lo es el proceso metabólico de la levadura ante la presencia de azúcar. Esta reacción provoca un aumento de volumen de la feromona debido a la creación de burbujas. Además, presenta un proceso de reacción que dura varios minutos, lo que coincide con el principio de evaporación buscado en la feromona.
Materiales y métodos
Feromona ferromagnética
Se propone la deposición de una feromona ferromagnética desde el robot móvil Robotino de Festo. La feromona utilizada es la propuesta por Brenes-Torres et al. en [4]. La composición de la feromona a utilizar se muestra en el Cuadro 1, donde se indica la composición de cada una de las dos sustancias que la conforman.
Cuadro 1. Composición de la feromona a utilizar.
|
Sustancia de la feromona |
Material |
Cantidad |
|
Ferromagnética |
Fe3O4 |
3 g |
|
Agua |
4 mL |
|
|
Azúcar blanco |
3g |
|
|
Evaporación |
Levadura seca |
2g |
|
Agua |
6 mL |
Fuente: adaptado de [4].
Diseño del sistema de deposición
En el diseño del sistema se definieron como entradas la energía que lo alimentará, los materiales o dispositivos utilizados en el diseño del sistema de deposición y las señales de accionamiento manual por parte del usuario y de accionamiento automático por parte del Robotino. Y como salida del sistema el material, la feromona ya mezclada y magnetizada.
Se analizaron todas las posibilidades para cada componente del diseño, organizadas en energía, materiales y señales, se realizaron tres árboles de combinación que consideran todas las posibles combinaciones para el diseño del sistema de deposición. Luego, se procedió a analizar cada una de ellas, descartando las menos promisorias. La selección del diseño final se organizó en dos etapas: la etapa de filtrado y la etapa de evaluación de conceptos. En la etapa de filtrado se elaboró una matriz de selección, se evaluaron y ordenaron todos los posibles conceptos por medio de una combinación y mejora de los mismos y finalmente se seleccionó uno o más conceptos.
Para el accionamiento por medio de señales manuales se seleccionó la conexión del botón directamente entre la alimentación y la bomba. En el accionamiento automático se definió por medio de la utilización de una señal digital proveniente del Robotino, seguida de una programación en el entorno RobotinoView de Festo y la utilización de un optoacople para acoplar el circuito digital con el circuito de potencia.
En la rama de materiales, la combinación de un envase de vidrio con tapa, una bomba peristáltica, un tubo de silicón, un conector “Y”, magnetos de neodimio (por su elevada concentración magnética entre los polos del imán) y una punta de goteo obtuvo la mejor evaluación respecto al resto de combinaciones, debido principalmente a la capacidad de control de parámetros, la capacidad de depositar gotas pequeñas, así como también su tamaño.
En el Cuadro 2 se muestra un resumen de los conceptos seleccionados para cada una de las ramas de la descomposición funcional definidas anteriormente
Cuadro 2. Resumen de conceptos ganadores.
|
Rama de descomposición funcional |
Concepto ganador |
|
Energía |
Alimentación desde Robotino con interfaz de potencia |
|
Materiales |
-Envase de vidrio con tapa en forma de tubo de ensayo, con volumen de 25 cm3, diámetro de 3 cm y una altura de 5 cm, -Bomba peristáltica modelo Intllab modelo RS385-635, con un motor de corriente directa de 12V y 3 W de potencia con dimensiones de 5.5 cm x 6.7 cm x 4.1 cm y un diámetro de la circunferencia de bombeo de 3 cm. -Tubo de silicón flexible de 2 mm diámetro en el interior 4 mm en el exterior. -Conector “Y” a base de polímeros. - Magnetos de neodimio de 10 mm de diámetro de 10 mm, 5mm de espesor de 5 mm, 2.9 mg de masa unitaria de 2.9 mg y 26.5 N de fuerza de atracción. -Punta de goteo a base de polímero y fabricada para tuberías de 2mm diámetro interno y realizan una diminución a un diámetro de 1mm. |
|
Señales manuales |
Botón, entre la alimentación y la bomba, de 9.5mm de diámetro, 27.5mm de largo, con una resistencia en contacto de 20mΩ, una vida útil de 50.000 ciclos y una capacidad de corriente de hasta 3 A |
|
Señales automáticas |
Señal digital proveniente del Robotino de 24 V, a prueba de cortos circuitos y con una corriente máxima de 1 A., seguida de una programación en el entorno Robotino View de Festo y la utilización de un optoacople para acoplar el circuito digital con el circuito de potencia, con una corriente de colector máxima de 50 mA |
La etapa de magnetización considera la posición de los imanes colocados de forma que las líneas de campo laterales queden paralelas al movimiento de la sustancia. De lo contrario, el campo magnético se opondría al flujo del ferrofluido. También, se utilizaron placas de acero por encima y por debajo de los imanes, creando una etapa de magnetización enjaulada. La intensidad del campo magnético es significativamente menor fuera de las placas de acero. Esto minimiza el efecto de las líneas de campo superior e inferior de los imanes. Además, garantiza que la alineación de las partículas en el ferrofluido se mantenga y evita el retorno del líquido. La manguera con la feromona pasa entre ambos magnetos, de modo que se magnetiza antes de su deposición (ver Figura 3).
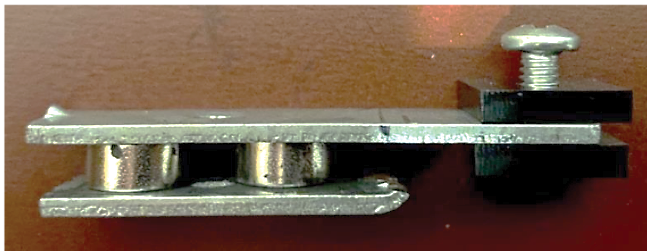
Figura 3. Estructuras de acero a utilizar en la etapa de magnetización después del maquinado.
La programación, para el trazado de la trayectoria, desarrollada en la herramienta RobotinoView, se describe en el diagrama de flujo de la Figura 4. Se implementó una trayectoria en forma de arco con rectas para la implementación de las pruebas. La longitud de las rectas y la distancia entre gotas son variables, son variables que define el usuario. Asimismo, la activación de la bomba se rige por un temporizador y la distancia entre gotas se define como una función de la velocidad del Robotino.
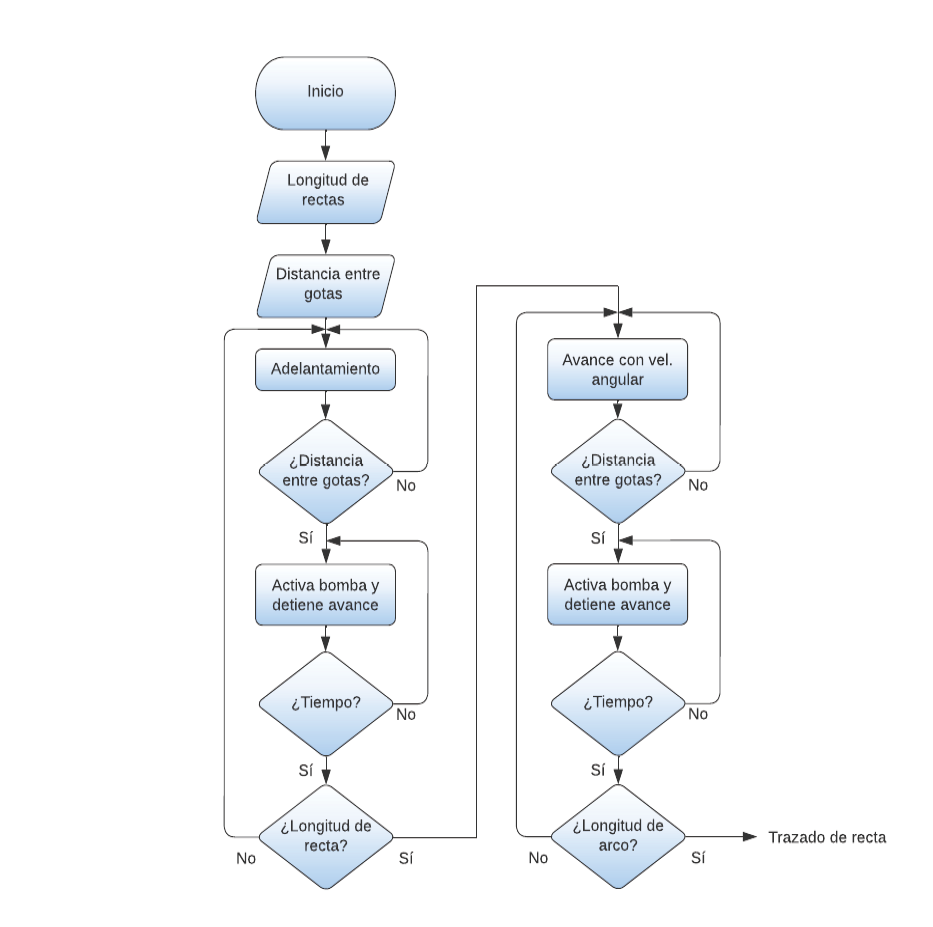
Figura 4. Diagrama de flujo de la programación implementada.
Se diseñó una carcasa de modo tal que se pudieran colocar: los envases, la placa perforada, el botón, el motor y la sección de deposición con las placas y los magnetos correspondientes, tal y como se muestra en la Figura 5. Dicha carcasa fue manufacturada en acrílico mediante el proceso de corte láser.
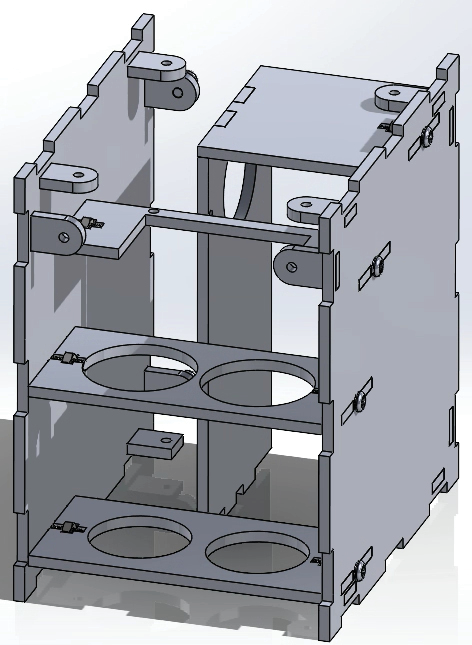
Figura 5. Carcasa solo con tapas laterales y piezas internas.
Finalmente, el sistema montado en el Robotino en conjunto con el programa descrito anteriormente permite realizar la trayectoria y la deposición mostradas en la Figura 6.
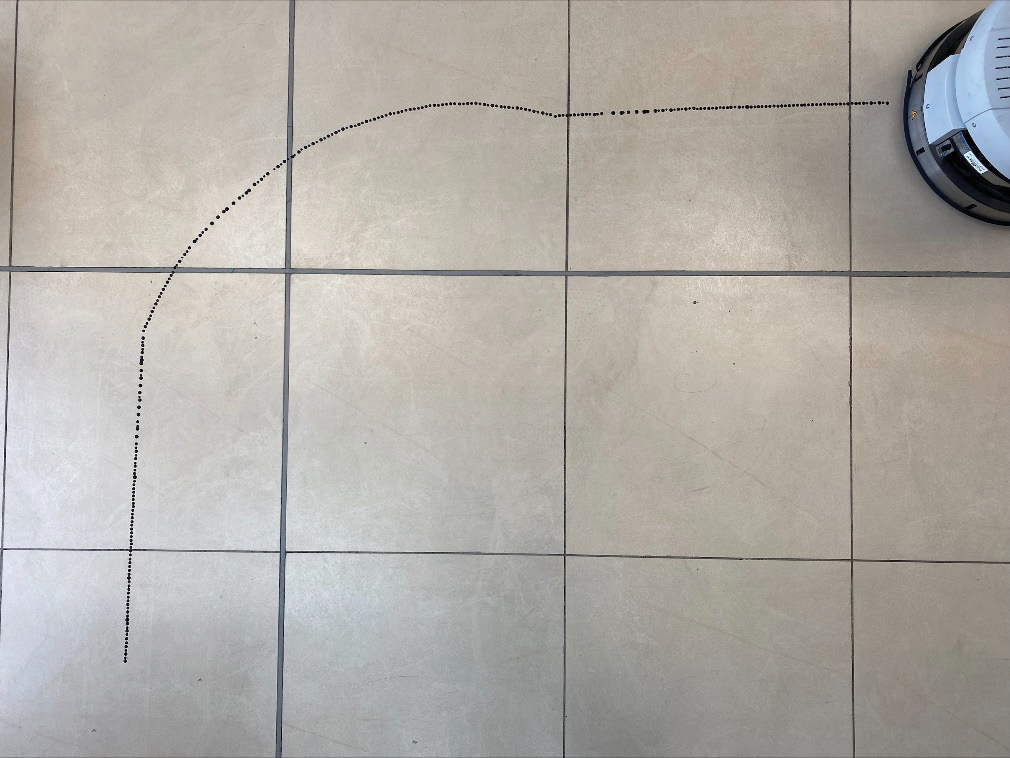
Figura 6. Trayectoria completa realizada por el robot Robotino con el sistema de feromona.
Resultados
Se procedió a realizar una serie de pruebas con distintos tiempos de activación de la bomba peristáltica para determinar el tiempo adecuado para obtener el valor de diámetro de la gota más cercano al valor objetivo de 6mm (Cuadro 3). Se tomaron 22 muestras para cada tiempo de deposición y se obtuvo que el tiempo de activación, que daba como promedio un valor más cercano al objetivo es el tiempo de activación de 2ms (Figura 7).
Cuadro 3. Diámetros de gota obtenidos en experimentos con distintos tiempos de activación de la bomba peristáltica.
|
Tiempo de activación (ms) |
Promedio (mm) |
Desviación estándar (mm) |
Coeficiente de variación |
Porcentaje de error |
|
4.0 |
6.18 |
0.98 |
15.89% |
3.0% |
|
3.5 |
6.14 |
0.52 |
8.40% |
2.3% |
|
2.0 |
6.09 |
0.55 |
9.00% |
1.5% |
|
1.0 |
9.11 |
1.53 |
16.83% |
51.8% |
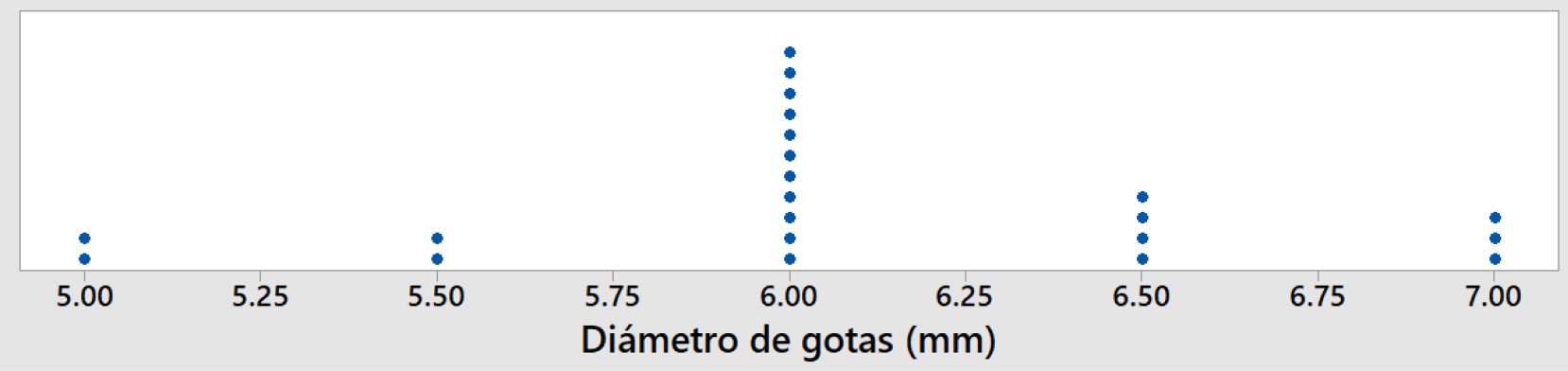
Figura 7. Detalle de las mediciones de diámetro de gota para la muestra con tiempo de activación de 2ms.
Con respecto a la distancia entre gotas, para cada uno de los tiempos de activación, se consideraron 22 gotas depositadas (Cuadro 4). En todos los casos, en el programa se definió una distancia de 60mm entre gotas (Figura 8). Nuevamente el tiempo de deposición de 2ms presentó el porcentaje de error menor y el menor coeficiente de variabilidad.
Cuadro 4. Distancias entre gotas obtenidos en experimentos con distintos tiempos de activación de la bomba peristáltica.
|
Tiempo de activación (ms) |
Promedio (mm) |
Desviación estándar (mm) |
Coeficiente de variabilidad |
Porcentaje de error |
|
4.0 |
60.14 |
0.31 |
0.52% |
0.24% |
|
3.5 |
60.12 |
0.30 |
0.51% |
0.19% |
|
2.0 |
60.09 |
0.30 |
0.50% |
0.16% |
|
1.0 |
91.43 |
30.70 |
33.58% |
52.38% |

Figura 8. Ejemplo de la distancia entre gotas de feromona para un tiempo de deposición de 2ms.
La medición de magnetización se llevó a cabo utilizando un magnetómetro modelo CJMCU-008. Se recopilaron los datos de campo magnético en el eje Z desde un punto sobre la gota y otro punto alejado 60mm del centro de la gota, para un total de 12 gotas. Además, esto se realizó en distintos tiempos luego de la deposición (0 min, 10 min, 20 min y 30 min). En la gráfica de la Figura 9 se observan los resultados obtenidos para el valor del delta de magnitud de campo magnético. Se logra observar que la mayor variación en la magnitud del delta medido por el magnetómetro, ante la presencia de una gota de feromona, se da en los primeros 10 minutos. Seguidamente, la variación detectada por el magnetómetro sigue disminuyendo paulatinamente hasta que, a los 30 minutos de haber sido depositada, la sustancia prácticamente ya ha perdido casi todo su efecto magnético.
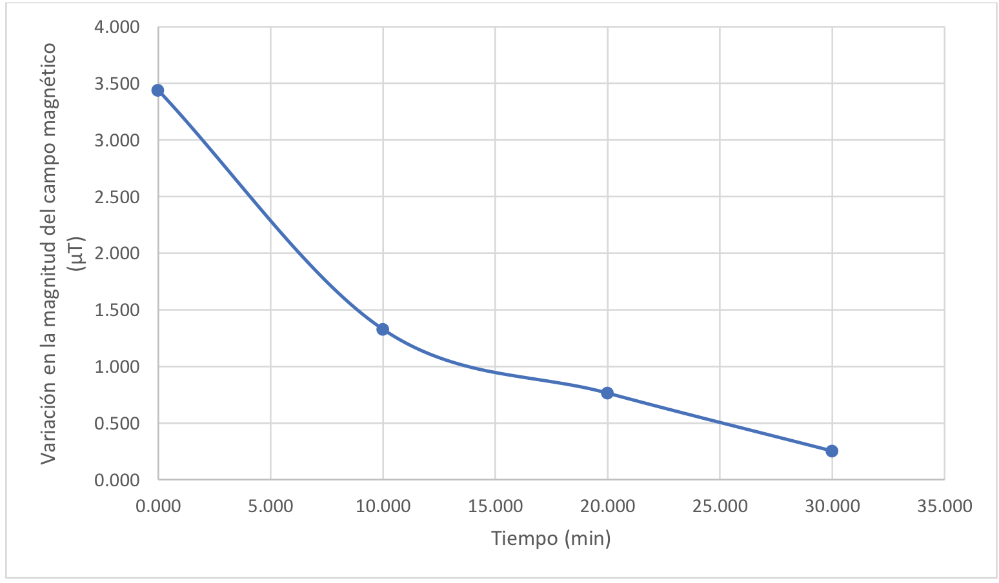
Figura 9. Gradiente de la variación de campo magnético ante la presencia de gotas de feromona en función del tiempo.
A partir de los datos presentados anteriormente, se logra validar la propiedad de magnetización esperada en la sustancia, y la difusión, observada por medio de un gradiente conforme se acerca el sensor a la gota. La propiedad de evaporación se observa mediante la reducción en función del tiempo de la variación de la magnitud del campo magnético al estar en presencia de una gota de feromona.
Conclusiones y recomendaciones
Se diseñó e implementó un conjunto electromecánico capaz de llevar a cabo la deposición, mezcla y magnetización de una sustancia compuesta por una componente ferromagnética y otra componente de levadura hidratada.
Por medio del entorno RobotinoView se desarrolló un programa que permite la deposición de la feromona en la trayectoria deseada, con la posibilidad de que el usuario ingrese las longitudes de las rectas, así como también la distancia entre gotas.
Además, se determinó que el tiempo efectivo de magnetización de la gota es de aproximadamente 30 minutos, después de su deposición, y que el tiempo de activación de la bomba, para obtener una gota según los requerimientos deseados, es de 2 ms.
La bomba peristáltica, utilizada para el bombeo de la feromona, evita la contaminación cruzada entre el fluido a bombear y los elementos internos de la bomba, y además permite deponer volúmenes de fluido desde gotas hasta flujos continuos.
El conector, de acrílico, tipo “Y”, permite almacenar los dos componentes de la feromona por aparte y mediante una única bomba generar vacío en ambos envases y que el mezclado de las sustancias se dé de forma simultánea a la deposición de esta. Esto permite que la evaporación del efecto magnético de la gota producida por la fermentación comience hasta la deposición de la feromona y no mientras está almacenado.
Entre los aspectos de mejora y trabajos futuros se considera importante utilizar una bomba peristáltica de menor profundidad, pero con el mismo diámetro de rotor con el objetivo de disminuir las dimensiones del ensamble sin afectar la capacidad de deposición de gotas pequeñas. También reducir el tamaño del sistema mediante un posible reacomodo de los componentes que componen el ensamble electromecánico e implementar el circuito de control diseñado en una placa PCB. Por último, diseñar un elemento de fijación del ensamble electromecánico al robot en caso de que se desee utilizarlo en superficies irregulares y de poca planicidad, para evitar que el sistema se desplace o voltee debido a las vibraciones y saltos producidos por la superficie.
Agradecimientos
Agradecemos a la Vicerrectoría de Investigación y Extensión, del Instituto Tecnológico de Costa Rica (VIE-ITCR), por su apoyo y soporte al proyecto denominado “Atta-Bots: Adaptaciones, comportamientos y funcionalidades en el marco de los proyectos PROE” (código 5402-1440-5101), estos resultados son parte de dicho proyecto. También se agradece al Área Académica Ingeniería Mecatrónica, del Instituto Tecnológico de Costa Rica, por permitirnos utilizar los robots Robotinos para este trabajo.
Referencias
[1] C. Calderon-Arce y R. Solis-Ortega, “Swarm Robotics and Rapidly Exploring Random Graph Algorithms Applied to Environment Exploration and Path Planning,” International Journal of Advanced Computer Science and Applications, vol. 10, n.o 5, 2019. doi: 10.14569/IJACSA.2019.0100586.
[2] R. Fujisawa, S. Dobata, K. Sugawara, et al. “Designing pheromone communication in swarm robotics: Group foraging behavior mediated by chemical substance.” Swarm Intelligence, vol. 8, no. 3, pp. 227–246, Sep. 2014. Consultado: 11-Sep-2022. DOI: 10.1007/s11721-014-0097-z.
[3] Heylighen, F. Stigmergy as a universal coordination mechaism I: Definition and components. Cogn. Syst. Res. 2016, 38, 4–13.
[4] J.C. Brenes-Torres, F. Blanes, J. Simo, “. Magnetic Trails: A Novel Artificial Pheromone for Swarm Robotics in Outdoor Environments.” Computation, vol. 10, no. 6, Jun., pp. 98, 2022.
[5] Karras, U. (2009). Robotino–an open learning mobile robot system for robocup.
[6] M. Yogeswaran, S. G. Ponnambalam. (2010). An Extensive Review of Research in Swarm Robotics. Presentado en Nature & Biologically Inspired Computing, 2009. NaBIC 2009.
[7] Calderón-Arce, C., Brenes-Torres, J. C., & Solis-Ortega, R. (2022). Swarm Robotics: Simulators, Platforms and Applications Review. Computation, 10(6), 80.
[8] I. Navarro, F. Matía, “An Introduction to Swarm Robotics”, Hindawi Publishing Corporation, vol. 2013, no. 1, Ene. 2013. Consultado: 12-Sep-2022. DOI: 10.5402/2013/608164.
[9] A. Hannawati, J. Iskandar y R. A. Russell. (2007), Pheromone Communication Simulation for Mobile Robots Using Java 3D. Presentado en Computer and Information Science, 2007. ICIS 2007. [En línea]. Disponible:
[10] S. Camazine, J.L. Deneubourg, N.R. Franks, et al, Self-organization in biological systems. 1.ed, Princeton, Nueva Jersey, Estados Unidos de América: Princeton University Press, 2003.
[11] I, Susnea, “A Brief History of Virtual Pheromones in Engineering applications”, American Journal of Engineering Research (AJER), vol. 5, no. 3, pp. 70-76, Mar. 2016. Consultado 11-Sep-22.
[12] Salman, M., Garzón Ramos, D., Hasselmann, K., & Birattari, M. (2020). Phormica: Photochromic pheromone release and detection system for stigmergic coordination in robot swarms. Frontiers in Robotics and AI, 7, 591402.
[13] R. Fujisawa, H. Imamura, F. Matsuno. Cooperative transportation by swarm robots using pheromone communication. In Distributed Autonomous Robotic Systems; Springer: Cham, Switzerland, 2013; pp. 559–570.
1 Ingeniero en Mecatrónica, Instituto Tecnológico de Costa Rica. Costa Rica. Correo electrónico: daniel.monge@estudiantec.cr
2 Escuela de Ingeniería en Mecatrónica, Instituto Tecnológico de Costa Rica, Costa Rica. Estudiante Doctorado en Automática, Robótica e Informática Industrial. Universidad Politécnica de Valencia, España
Correo electrónico: juanbrenes@tec.ac.cr https://orcid.org/0000-0001-6323-2173
https://orcid.org/0000-0001-6323-2173
3 Escuela de Matemática, Instituto Tecnológico de Costa Rica. Costa Rica.
Correo electrónico: ccalderon@itcr.ac.cr https://orcid.org/0000-0002-0077-225X