Desarrollo y prueba de un sistema para sensar de manera remota la velocidad del viento
Development and testing of a system for remote wind speed sensing
Nestor Martínez-Soto1, Juan J. Rojas2, Gustavo Richmond-Navarro3
Martínez-Soto, N; Rojas, J.J; Richmond-Navarro, G. Desarrollo y prueba de un sistema para sensar de manera remota la velocidad del viento. Tecnología en Marcha. Vol. 35, especial Programa de Investigación en Energías Limpias. Julio, 2022. Pág. 33-45. https://doi.org/10.18845/tm.v35i7.6331
https://doi.org/10.18845/tm.v35i7.6331
Palabras clave
Anemómetro; velocidad del viento; Internet de las cosas; túnel de viento; medición remota.
Resumen
En el campo de la energía eólica, la velocidad del viento es el parámetro principal, por lo que lograr medirlo de manera autónoma puede permitir conocer el recurso eólico en zonas remotas, además de brindar una mayor eficacia en la tarea de operar y estudiar turbinas eólicas. La medición de un parámetro con tanta variabilidad como la velocidad del viento presenta desafíos como la capacidad de muestrear con la suficiente frecuencia, el poder asegurar la validez de las medidas y en tener un espacio accesible para registrar dichas mediciones. Este trabajo desarrolla una solución de bajo costo basada en el Internet de las cosas para medir y registrar la velocidad del viento mientras se busca abarcar los desafíos anteriores. En el diseño realizado se enlazó un anemómetro de copas con un microcontrolador ESP32 que, mediante un algoritmo computacional programado en C, se encargó de determinar la velocidad del viento y publicarla en tiempo real en internet. El anemómetro empleado es comercial y se reemplazó el software del fabricante por una solución propia tanto de hardware como de software. Las pruebas de validación requeridas por el diseño construido se realizaron mediante el uso del túnel de viento de la Universidad de Costa Rica. El trabajo dio como resultado la construcción de un sistema con la capacidad de registrar la velocidad del viento en tiempo real, así como de una base para un desarrollo más completo para el estudio de parámetros adicionales en el funcionamiento de las turbinas eólicas.
Keywords
Anemometer; wind speed; Internet of things; wind tunnel; remote monitoring.
Abstract
The main parameter in the field of wind energy is the wind speed, being able to measure it in an autonomous way allow to know the wind resource in remote areas, an also providing greater efficiency in the task of operating and studying wind turbines. Measuring a parameter with much variability as wind speed presents various challenges such as the capacity to take enough samples, the capacity to ensure the validity of the measurements and the requirement of an accessible place to record these measurements. This work develops a low-cost solution applying the Internet of Things to measure and logging wind speed data while seeking to solve the above challenges. In this design a cup anemometer was linked to an ESP32 microcontroller and using a computational algorithm programmed in C was responsible for determining the wind speed and publishing the result on the Internet in real time. A commercial anemometer was used, and the manufacturer’s software was replaced by an own solution. The validation tests required by the design were performed using the wind tunnel of the Universidad de Costa Rica. This work result in the construction of a system with the ability to record wind speed data in real time, as well as a basis for a more complete system in the study of additional parameters in the operation of wind turbines.
Introducción
La velocidad del viento es la característica de mayor impacto para la energía eólica, la potencia disponible en el viento es proporcional a la velocidad elevada al cubo [1], esto convierte a la velocidad en una variable efectiva para describir el recurso eólico y definir los sitios para instalar aerogeneradores. La velocidad del viento contribuye a identificar la seguridad de operar una turbina eólica [2], además de ser un componente en los estudios de la eficiencia y el desarrollo de las respectivas curvas de potencia de los aerogeneradores [3].
La medición de la velocidad del viento representa un desafío, pues es una variable sujeta a variación tanto en el tiempo como geográficamente [1]. Los anemómetros de copas son los equipos que suelen usarse en la industria para medición de la velocidad del viento, según recomendación visible en la norma IEC 61400-12-1 [3], estos se diseñan usualmente con tres o cuatro copas unidas a un eje vertical, todo este conjunto se encuentra construido en un material ligero. Cuando el anemómetro se encuentra en un flujo de aire, una de las superficies de la copa tiende a experimentar una mayor fuerza debido al arrastre, lo cual genera una rotación en torno a un eje vertical, siendo esta rotación directamente proporcional a la velocidad del viento, la relación anterior se registra y con base en ella se calibra el anemómetro [1].
La alternativa de toma manual de datos de velocidad del viento es inviable, debido a que las campañas de medición usualmente toman doce meses [4], esto para abarcar todas las estaciones del año. Por lo tanto, esta tarea resulta preferible realizarla mediante un sistema de adquisición de datos, el cual debería ser capaz de realizar las mediciones automáticamente y reportarlas en tiempo real o bien almacenarlas.
Existen sistemas complejos y de alto costo para mapear el recurso eólico, como el LIDAR [5], un sistema que mediante el efecto Doppler aplicado a señales ópticas permite caracterizar la velocidad del viento en un área, estas mediciones se realizan usualmente desde tierra. Una opción que se ha explorado recientemente para el monitoreo de la velocidad del viento de manera remota es mediante la integración del Internet de las Cosas (IoT), algunos trabajos se han enfocado al recurso eólico [6] y otros al monitoreo de turbinas, donde entre sus parámetros se encuentra la velocidad del viento [7, 8]. El uso del IoT para aplicaciones dentro del sector energía permite una mejora en la comprensión y control de los sistemas monitoreados [9], lo cual repercute de manera positiva en la eficiencia, la confiabilidad, la reducción del costo, la seguridad y los planes de monitoreo de la condición [8].
El desarrollo de una aplicación de IoT agrega desafíos como lo son la escogencia de los dispositivos de medición y comunicación, la selección de las características de comunicación en cuanto a protocolo y tecnología de comunicación, así como los requerimientos del registro de datos como el acceso y la frecuencia [10].
Las tareas de comunicación están sumamente relacionadas con los microcontroladores, estos dispositivos se encargan de conectar los objetos inteligentes con el internet, además suelen cumplir funciones de control, adquisición de datos de los sensores o aplicaciones. Algunos de los principales son el Arduino, la Raspberry Pi y los basados en el ESP8266 y el ESP32 [11]. Entre los criterios para seleccionar un determinado microcontrolador destaca las tecnologías de comunicación que soporta: conexión por WiFi, bluetooth, LoRa u otro. Con tecnologías de comunicación se refiere a la red o espacio provisto para la comunicación de los dispositivos [12]. Junto a las tecnologías de comunicación se encuentran los protocolos de comunicación, los cuales se encargan de definir las reglas de la transmisión de datos. Un protocolo de uso común en el IoT es el MQTT (Message Queuing Telemetry Transport), esto debido a su eficiencia. Este protocolo se caracteriza por la presencia de varios usuarios, los cuales pueden suscribirse a un tema y enviar mensajes que serán recibidos por todos los otros usuarios suscritos a dicho tema [13].
Para la tarea de registrar de datos se suele recurrir a la computación en la nube, con esta opción se dispone de servicios, aplicaciones, capacidad de almacenamiento y herramientas de procesado de datos mediante internet [10], algunas opciones para la computación en la nube son pagadas, pero también existen opciones gratuitas, aunque con capacidades más limitadas.
En este trabajo se propone diseñar y construir un sistema propio y de bajo costo empleando IoT para la medición de manera remota de la velocidad del viento. La aplicación se llevará a cabo en un anemómetro de copas comercial y se validarán los resultados mediante pruebas en un túnel de viento. El sistema también presenta la base para integrar en un futuro el monitoreo de parámetros adicionales para el estudio de la eficiencia de turbinas eólicas.
Materiales y métodos
Equipamiento
Se utilizó el anemómetro comercial de 3 copas modelo Vortex, marca Inspeed mostrado en la figura 1. De acuerdo con el fabricante, al anemómetro le toma un segundo completar una revolución cuando la velocidad del viento es de 2,5 mph. En cada revolución se da un cierre de los contactos magnéticos, lo cual se traduce en un pulso (2,5 mph = 1 Hz) [14]. El anemómetro debe colocarse a la altura que se desea monitorear la velocidad del viento, además se pueden colocar varios a diferentes alturas para desarrollar el perfil de la velocidad del viento.

Figura 1. Anemómetro utilizado. Fuente: [14].
Se empleó el microcontrolador WiFi LoRa 32 (V2) de HELTEC Automation, este microcontrolador es adecuado para proyectos de IoT y dispone de varios chips integrados que permiten la comunicación por WiFi, bluetooth y LoRa [15].
Los circuitos se realizaron en una protoboard, un elemento que permite el fácil montaje de componentes eléctricos y electrónicos para la realización de pruebas y prototipos.
Se empleó el túnel de viento de la Universidad de Costa Rica (UCR) para validar el sistema. Este túnel dispone de un motor de 40 HP y un variador de frecuencia, el cual permite configurar la velocidad de rotación del motor de 1000 RPM a 1770 RPM. Según el fabricante existe una relación lineal entre la velocidad de rotación del motor y la velocidad del viento en la sección de pruebas del túnel. Este equipo posee un sistema de adquisición de datos, cuya frecuencia de registro se puede configurar con valores entre 10 Hz y 2000 Hz [16], este sistema registra la velocidad del viento, además de variables ambientales como humedad, presión atmosférica y temperatura.
Metodología
La metodología consiste en 3 partes: el diseño del circuito, el código y las pruebas realizadas en el túnel de viento:
Desarrollo del sistema de sensado
Inicialmente se tiene un anemómetro, el cual cierra sus contactos cada vez que se completa una revolución, para pasar de esta acción a una señal interpretable por el microcontrolador se agrega el circuito pull up de la Figura 2, un circuito de uso común para interruptores. Este circuito consta de una señal de voltaje y una resistencia, mediante los cuales se logra que en el punto denominado GPIO 2 (pin de propósito general, puede ser usado como entrada o salida según lo defina el usuario) se tenga una señal alta en condiciones normales, pero que cambia de estado a una señal baja cuando se cierran los contactos del anemómetro, dado que las copas del anemómetro siguen girando, los contactos magnéticos se volverán a abrir y se presentará de nuevo un valor alto. Debido al proceso anterior, se va a tener una señal compuesta de varios pulsos en el GPIO2.
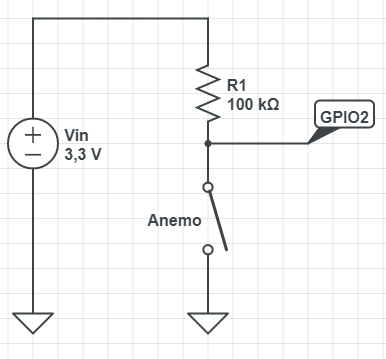
Figura 2. Circuito para enlazar el anemómetro con el microcontrolador.
Los pulsos anteriores pueden ser reconocidos por el microcontrolador y es lo que permite enlazar este con el anemómetro. El microcontrolador dispone de varios pines que se pueden usar como entradas, para este trabajo se escogió utilizar el Pin 2. El microcontrolador se encarga de proveer la alimentación para este circuito, además de compartir tierra con este.
Se implementó el circuito en una protoboard y se colocó dentro de una caja plástica diseñada para exteriores. Para la alimentación del microcontrolador se requieren 5 V, que pueden ser aplicados mediante el puerto USB o en el pin de 5 V, el sistema propuesto puede conectarse a la red eléctrica y mediante un adaptador obtener los 5 V necesarios.
Desarrollo del código
Mediante un código programado en C y compilado en el software Arduino se dan las instrucciones al microcontrolador, en este caso se le indica que cuando identifique un cambio de estado de bajo a alto se registre el instante cuando ocurre, a partir de este dato y el de la señal anterior se calcula la diferencia entre los tiempos de dos pulsos consecutivos, lo cual corresponde al periodo. Después de un segundo los periodos registrados se promedian y con el inverso de este valor se calcula la frecuencia de rotación, la cual si se retoma la relación dada por el fabricante permite obtener la velocidad. En el código se incluye consideraciones de escenarios como la ausencia de pulsos y la presencia de rebotes del interruptor. El proceso realizado por el código se muestra mediante el diagrama de flujo de la figura 3.

Figura 3. Diagrama de flujo del código para obtener la velocidad del viento.
Una vez cumplida la tarea de medir la velocidad del viento, se prosigue con las tareas de transmitir este valor y registrarlo. Mediante el chip ESP32 integrado en el microcontrolador y el uso de la librería WiFi de Arduino el microcontrolador se conecta a Internet. Se escogió una conexión mediante la tecnología WiFi para aprovechar la red existente.
Los datos son transmitidos usando el protocolo MQTT a un servidor gratuito de Adafruit, este servidor permite registrar 30 datos por minuto, expandible a 60 datos por minuto. Los datos transmitidos son almacenados durante 30 días. Los datos se publican en el servidor en intervalos adecuados según la cantidad de datos por minutos que se disponga. El proceso realizado por el código para transmitir y registrar los datos se muestra mediante el diagrama de flujo de la figura 4.
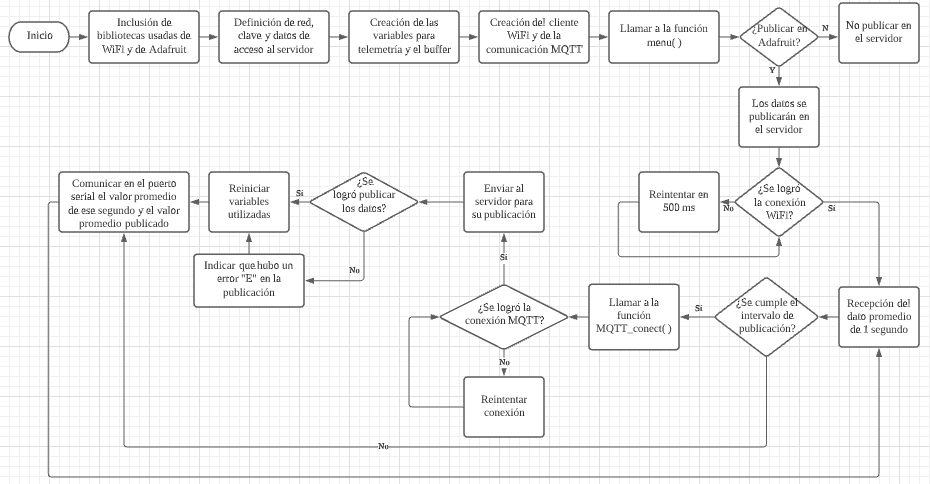
Figura 4. Diagrama de flujo del código para el registro de datos.
El código se encuentra disponible en un repositorio en GitHub [17].
Pruebas del sistema
Para validar el funcionamiento del sistema se procede a diseñar un experimento, este consiste en colocar el anemómetro de copas dentro de un túnel de viento y comprobar su comportamiento. La norma ISO 17713-1:2007 [18] recomienda probar los anemómetros de copas a distintas velocidades (mínimo cinco) que pertenezcan al rango de uso y estén igualmente espaciadas entre sí. Con los valores de velocidad registrados por el sistema que trabaja junto al anemómetro y por los equipos del túnel de viento se determina el porcentaje de error, en la literatura se indica que los anemómetros de copas manejan porcentajes de error del 3% [1]. En caso de que el sistema no se encuentre calibrado se procede a realizar una regresión lineal por mínimos cuadrados para actualizar la función de salida del anemómetro, después de ajustar la relación de salida se procede a repetir el procedimiento hasta alcanzar valores aceptables en el porcentaje de error.
Para el experimento se escogió realizar mediciones a siete velocidades de rotación del motor, las cuales van de 1000 RPM a 1600 RPM, la medición para cada velocidad toma 5 minutos, durante los cuales el sistema propuesto tomaba 1 muestra por segundo y el sistema de adquisición del túnel tenía una frecuencia de muestreo de 100 Hz. Las mediciones de cada velocidad se repitieron 3 veces para asegurar repetibilidad, además el orden de pruebas se aleatorizó según las recomendaciones de la literatura [19]. El montaje del anemómetro de copas dentro del túnel de viento de la UCR se puede ver en la figura 5.

Figura 5. Montaje del anemómetro de copas y referencia de anemómetro de hilo caliente, en el túnel de viento de la UCR.
Resultados
El sistema implementado se muestra en la figura 6. Como se puede apreciar, se están usando pocos pines del microcontrolador, lo que deja abierta la posibilidad de incluir en un futuro el monitoreo de anemómetros adicionales o el monitoreo de otras variables que puedan resultar de interés.
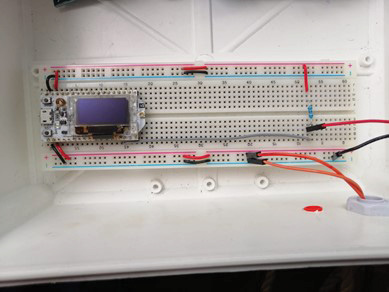
Figura 6. Sistema diseñado para medición remota de la velocidad del viento.
Como se mencionó en la sección de desarrollo del sistema, se requiere mantener una alimentación de 5 V en uno de los pines para alimentar al microcontrolador, el diseño propuesto busca cumplir este requerimiento incluyendo un adaptador que permite tomar la energía de la red eléctrica. Lo anterior puede resultar una solución insuficiente para realizar mediciones en sitios en los que no se disponga de cómo conectar el sistema a la red eléctrica, la alternativa es alimentar al microcontrolador mediante una batería, pero no es lo recomendable cuando se usa la conexión WiFi, debido al consumo de corriente que implica dicha conexión. La disponibilidad de la propia tecnología WiFi en el sitio de medición también puede resultar un inconveniente, pero resulta necesaria si se desea publicar los datos de manera directa en el servidor.
En la literatura [7] estos desafíos se afrontan mediante la inclusión de algunos equipos adicionales, con los cuales se realiza la siguiente configuración: se utiliza un microcontrolador para realizar las tareas de medición, en este caso determinar la velocidad del viento, dicho microcontrolador se encuentra energizado por una batería y transmite los datos mediante otra tecnología de comunicación con menor consumo de energía, usualmente LoRa, usar esta tecnología tiene la ventaja que permite largas distancias entre los dispositivos: 10 km o incluso más [12]. Un segundo microcontrolador que recibe los datos transmitidos por LoRa, se suele ubicar en un sitio donde se pueda asegurar el acceso a la red eléctrica y a la conexión WiFi, lo cual es más factible de conseguir dado el alcance que ofrece la comunicación LoRa. Este microcontrolador se encarga de la tarea de publicar los datos en el servidor. El primer microcontrolador se denomina nodo de control, mientras que el segundo microcontrolador se denomina nodo de transmisión, ver figura 7, tomada de [20]. El uso de esta configuración requiere de código adicional para enviar y recibir los datos por LoRa.
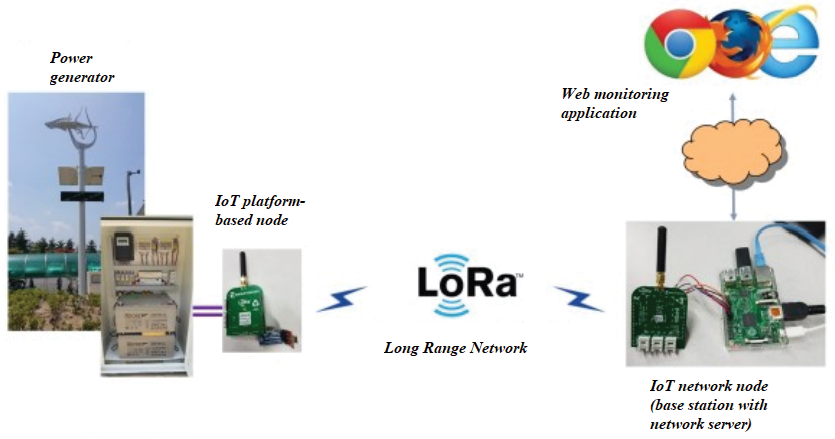
Figura 7. Diagrama de un sistema de monitoreo para una aplicación de IoT en energía renovable.
La validación realizada en el túnel de viento para obtener la función de salida del anemómetro y comprobar el funcionamiento del programa arrojó los resultados mostrados en las Figuras de la 8 a la 11. Mediante la ejecución del experimento detallado en la metodología, se obtuvo durante la prueba 1 los resultados de la figuras 8 y 9.

Figura 8. Velocidad promedio registrada por el software del túnel de viento y el anemómetro de copas en función de la velocidad del motor durante la prueba 1.
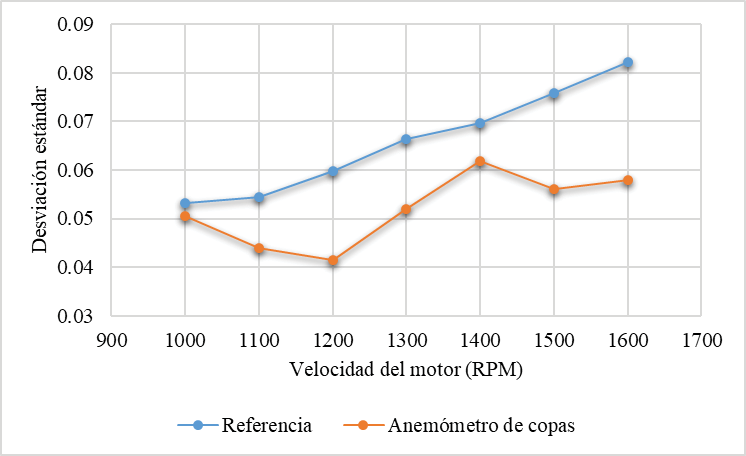
Figura 9. Desviación estándar de los datos registrados por el software del túnel de viento y el anemómetro de copas en función de la velocidad del motor durante la prueba 1.
En la figura 8 se puede apreciar el comportamiento lineal de ambas funciones y la misma tendencia, además se observa que los datos medidos por el anemómetro entregan un valor menor.
Mediante la figura 9 se observa que la variación de la velocidad promedio en el túnel de viento (velocidad de referencia) aumenta con las revoluciones por minuto, lo cual coincide con el comportamiento esperado según el manual de uso. En una prueba anterior, para la cual no se consideró el posible rebote del interruptor, se observó una variación de los datos del anemómetro considerablemente mayor, pero para este experimento si se consideró dentro del código este comportamiento, por lo que se obtuvieron datos con una variación menor y con una magnitud similar a los de la referencia.
Debido a la diferencia entre las mediciones se procedió a determinar la función de salida del anemómetro utilizado una regresión de mínimos cuadrados. Además, se realizó el calculó del coeficiente de determinación (R2), en el cual se obtuvo un valor de aproximadamente 1.
Se observa que la salida del anemómetro tiene una relación lineal respecto a la velocidad del viento, lo cual coincide con la teoría. Además, la intersección o constante de desplazamiento del cero no afecta considerablemente el resultado final en este caso. Con la función de salida obtenida se actualizó el programa y se realizó una segunda prueba, con la cual se obtiene los resultados de la figuras 10 y 11.
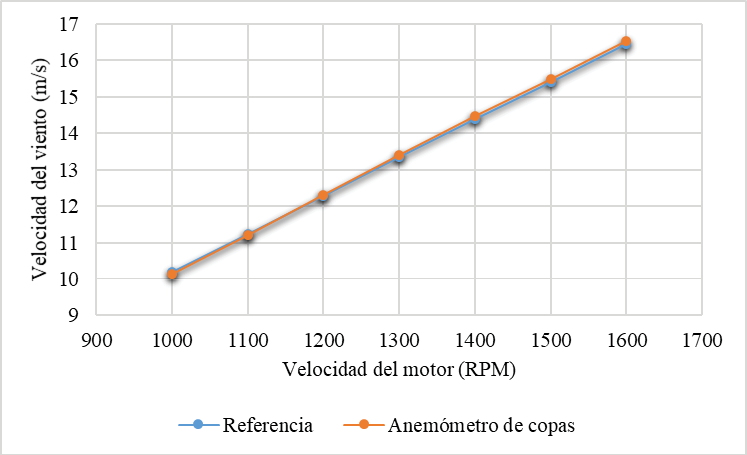
Figura 10. Velocidad promedio registrada por el software del túnel de viento y el anemómetro de copas en función de la velocidad del motor durante la prueba 2.

Figura 11. Desviación estándar de los datos registrados por el software del túnel de viento y el anemómetro de copas en función de la velocidad del motor durante la prueba 2.
Como se puede ver en la figura 10 y los porcentajes de error del cuadro 1, se obtuvieron valores cercanos entre los datos del anemómetro de copas y el Pitot de referencia del túnel de viento, con porcentajes de error menores al 1%. Debido a los porcentajes de error obtenidos para la prueba 2 se considera que la nueva función de salida del anemómetro es válida con un error mucho menor al 3% indicado en la literatura [1].
Cuadro 1. Porcentajes de error durante las pruebas realizadas.
|
Velocidad del motor (RPM) |
Porcentaje de error |
|
|
Prueba 1 (%) |
Prueba 2 (%) |
|
|
1000 |
8,73 |
0,42 |
|
1100 |
8,63 |
0,09 |
|
1200 |
8,64 |
-0,27 |
|
1300 |
8,64 |
-0,41 |
|
1400 |
8,60 |
-0,53 |
|
1500 |
8,67 |
-0,61 |
|
1600 |
8,69 |
-0,45 |
Las pruebas 1 y 2 fueron realizados en días diferentes, esto debido al tiempo que necesario para la toma de los datos. Las condiciones ambientales en las que se realizaron los experimentos se muestran en el cuadro 2.
Cuadro 2. Condiciones ambientales durante la realización de los experimentos.
|
Condiciones ambientales |
Prueba 1 |
Prueba 2 |
||
|
Promedio |
Desviación estándar |
Promedio |
Desviación estándar |
|
|
Presión (kPa) |
87,87 |
0,014 |
87,75 |
0,055 |
|
Temperatura (°C) |
25,3 |
0,39 |
24,5 |
0,49 |
|
Humedad (%) |
69,4 |
1,64 |
63,5 |
1,96 |
A pesar de presentarse una variación en la temperatura, principal variable que afecta la densidad del aire, en las dos pruebas se realizó una comparación de las mediciones respecto una referencia, por lo que los resultados son comparables entre sí para los casos de las pruebas 1 y 2.
Conclusiones
En esta investigación se desarrolló un sistema que permite la medición de manera remota de la velocidad del viento, además de incluirse la capacidad de registrar las mediciones, esto mediante un microcontrolador y el circuito que permite enlazarlo con el anemómetro de copas. Además, se incluyó una propuesta de un sistema adaptado para medición en sitios remotos. También se desarrolló un código para el cumplimiento de estas dos tareas: una de ellas siendo la determinación de la velocidad del viento a partir de los pulsos obtenidos mediante el circuito del anemómetro y la otra tarea que correspondería a la publicación de los datos en un servidor, donde pueden ser visualizados, además de funcionar como un almacenamiento temporal.
Con base en los resultados obtenidos es posible concluir lo siguiente:
•Se comprobó que existe una relación lineal entre la rotación del anemómetro y la velocidad del viento, lo cual coincide con la teoría.
•Se demostró la validez del sistema implementado pues los resultados ofrecen un porcentaje de error menor al 0,62% en todos los ensayos realizados.
•Es posible adaptar un anemómetro comercial par sensar de manera remota la velocidad del viento y utilizar IoT para el registro de los datos recolectados.
El sistema implementado en esta investigación sirve como base para desarrollos más complejos de medición de parámetros adicionales como lo son las variables atmosféricas, lo que eventualmente puede facilitar el mapeo del recurso eólico en sitios remotos, así como monitorear en tiempo real el recurso en zonas con acceso a internet.
Referencias
[1] K. R. Rao, Wind Energy for Power Generation: Meeting the Challenge of Practical Implementation, Springer Link, 2019.
[2] H. Wagner y J. Mathur, Introduction to Wind Energy Systems: Basics, Technology and Operation, Springer Link, 2018.
[3] International Electrotechnical Commission, IEC 61400-12-1:2017: Wind energy generation systems - Part 12-1: Power performance measurements of electricity producing wind turbines, 2017.
[4] R. Menke, N. Vasiljević, J. Wagner, S. P. Oncley y J. Mann, «Multi-lidar wind resource mapping in complex terrain,» Wind Energy Science, pp. 1059-1073, 2020.
[5] J. Gottschall, A. Papetta, H. Kassem, P. J. Meyer, L. Schrempf, C. Wetzel y J. Becker, «Advancing Wind Resource Assessment in Complex Terrain with Scanning Lidar Measurements,» Wind Energy Science, p. 3280, 2021.
[6] J. Gutiérrez, A. Orjuela y J. García, «Internet of Things Proposal for Measuring Wind Variables in a Smart Home Environment,» 2018.
[7] K. Mikhaylov, A. Moiz, A. Pouttu, J. Martín Rapún y S. Ayuso Gascon, «LoRaWAN for Wind Turbine Monitoring: Prototype and Practical Deployment,» IEEE Xplore, 2018.
[8] L. Alhmoud y H. Al Zoubi, «IoT Applications in Wind Energy Conversion Systems,» 2019.
[9] H. Shahinzadeh, J. Moradi, G. Gharehpetian, H. Nafisi y M. Abedi, «Internet of Energy (IoE) in Smart Power Systems,» IEEE Xplore, 2019.
[10] N. Hossein, J. Hunt, B. Zakeri y M. Mohammadrezaei, «Internet of Things (IoT) and the Energy Sector,» Energies, 2020.
[11] K. J. Singh y D. S. Kapoor, «A survey of IoT platforms: Create Your Own Internet of Things,» IEEE Xplore, 2017.
[12] J. Ding, M. Nemati, C. Ranaweera y J. Choi, «IoT Connectivity Technologies and Applications: A Survey,» IEEE Access, 2020.
[13] P. Marcon, F. Zezulka, I. Vesely, Z. Szabo, Z. Roubal, O. Sajdl, E. Gescheidtova y P. Dohnal, «Communication Technology for Industry 4.0,» IEEE Xplore, 2017.
[14] Inspeed, «inspeed.com,» [En línea]. Available: http://www.old.inspeed.com/default.asp.
[15] Heltec Automation, «Heltec Automation,» [En línea]. Available: https://heltec.org/.
[16] N. Kostreski y D. Grimm, Atmospheric Boundary Layer Tunnel Operations: Manual, 2017.
[17] N. Martinez y J. Rojas, «Github,» 2021. [En línea]. Available: https://github.com/DeltaLabo/anemos/tree/master/Velocidad.
[18] International Organization for Standardization, ISO 17713-1:2007: Meteorology - Wind Measurements, 2007.
[19] D. Montgomery y G. Runger, Probabilidad y estadística aplicadas a la ingeniería, 2003.
[20] C. S. Choi, J. D. Jeong, I. W. Lee y W. K. Park, «LoRa based Renewable Energy Monitoring System with Open IoT Platform,» 2018.
1 Escuela de Ingeniería Electromecánica. Instituto Tecnológico de Costa Rica. Costa Rica. Correo electrónico: nesmar@estudiantec.cr
https://orcid.org/0000-0001-8886-2614
2 Escuela de Ingeniería Electromecánica. Instituto Tecnológico de Costa Rica. Costa Rica. Correo electrónico: juan.rojas@tec.ac.cr
https://orcid.org/0000-0002-3261-5005
3 Escuela de Ingeniería Electromecánica. Instituto Tecnológico de Costa Rica. Costa Rica. Correo electrónico: grichmond@tec.ac.cr
https://orcid.org/0000-0001-5147-5952