Estación de recarga para dotar de mayor autonomía al Robobo
Charging station to provide greater autonomy to the Robobo
Mónica Vizcaíno-Delgado1
Vizcaíno-Delgado, M. Estación de recarga para dotar de mayor autonomía al Robobo. Tecnología en Marcha. Vol. 34, especial. Movilidad Estudiantil. Octubre 2021. Pág 90-100. https://doi.org/10.18845/tm.v34i5.5919
https://doi.org/10.18845/tm.v34i5.5919
Palabras clave
Plataforma robótica móvil; robótica autónoma; robótica colectiva; baterías de LiPo.
Resumen
Robobo consiste en una plataforma robótica móvil desarrollada por la compañía MINT de la Universidade da Coruña. Actualmente se utiliza como una herramienta para el aprendizaje y el aprovechamiento de las capacidades de la robótica autónoma y colaborativa en escuelas y centros de investigación, además cuenta con un paquete comercial educativo que incluye cuatro unidades. Sin embargo, el funcionamiento del Robobo carece de un proceso de recarga autónomo, automatizado, homogéneo o simultáneo. Es por lo tanto que este artículo trata la importancia y el diseño de un primer prototipo electromecánico de una estación de recarga para obtener un ciclo de carga autónomo y simultáneo de hasta cuatro plataformas robóticas móviles Robobo.
Keywords
Robotic mobile platform; autonomous robotics; collective robotics; LiPo batteries.
Abstract
Robobo is a mobile robotic platform developed by Universidade da Coruña’s MINT company. It is currently used as a tool for learning and benefit from the different advantages of autonomous and collaborative robotics at schools and investigation centers, it also can be found on the market as an educational package that includes four units. However, Robobo’s performance lacks on an autonomous, automated, homogeneous or simultaneous recharging process. Therefore, this article treats the importance and the design of a first electromechanical prototype of a charging station as an approach to obtain an autonomous and simultaneous charging cycle of up to four Robobo mobile platforms.
Introducción
Robobo es un robot educativo creado por la Universidade da Coruña para realizar proyectos de robótica autónoma. Su diseño consiste en una base móvil a la que se acopla un teléfono inteligente y posee características que le permiten ser utilizado no solo de forma individual en hogares, sino también en instituciones educativas y de investigación; desde escuelas hasta universidades. En cualquier nivel, permite el acceso a todos los sensores y actuadores de la plataforma robótica y del teléfono inteligente, y a todas las funcionalidades proporcionadas por el sistema operativo de Android [1].
Se identificaron deficiencias en el proceso de recarga del Robobo debido a su entorno usual de funcionamiento, que implica el uso simultáneo de múltiples plataformas y por lo tanto la posible necesidad de recargas simultáneas. Esto genera dependencia en el número de toma corrientes y de cargadores de pared disponibles. Además, la ausencia de la total autonomía del Robobo, y específicamente en su proceso de recarga, podrían derivar en posibles daños eléctricos o mecánicos de su base. En conjunto, estos factores derivan en un alto tiempo total de recarga y afectan la disponibilidad de Robobos.
Es por lo tanto que este artículo trata la importancia y el diseño de un primer prototipo de una estación de recarga que permita la carga autónoma y simultánea de hasta cuatro plataformas robóticas móviles Robobo. A continuación se presenta la caracterización de la robótica y los tipos de robots, de acuerdo con el Grupo de Robótica (GtRob) del Comité Español de Automática; se describen los requerimientos básicos para obtener una solución de recarga autónoma y simultánea óptima; y se concluye con un resumen del diseño electromecánico y del algoritmo que describe el funcionamiento del prototipo, el cual se detalla más a fondo en [2], donde se presenta el proceso para la obtención, desarrollo y validación del mismo.
Desarrollo
La robótica y sus ramas
Hoy en día es posible encontrar diversas definiciones de la palabra robot. De acuerdo con la Real Academia Española [3], su significado viene de la palabra checa robota, que se refiere a “trabajo o prestación personal”. En la enciclopedia británica [4] se amplía el término de robot a una máquina operada automáticamente que sustituye el esfuerzo de los humanos, aunque no tiene por qué poseer apariencia humana o desarrollar sus actividades a la manera de los humanos. Por lo tanto, por extensión, la robótica es la disciplina de la ingeniería encargada del diseño, construcción, programación y funcionamiento de los robots.
En [5] se utiliza el término de robot inteligente para referirse a una máquina capaz de extraer información de su entorno y utilizar el conocimiento obtenido para moverse de manera segura y significativa. Actualmente, la robótica se está abriendo camino a una nueva generación de robots con fines más allá de la ejecución de tareas repetitivas y más hacia los robots inteligentes. Cada vez se busca más dotar a los robots de capacidades cognitivas, como la percepción, la selección de acciones, el aprendizaje y el razonamiento, a través de métodos neuro-evolutivos como en el caso de [6].
Los nuevos paradigmas tienen como objetivo la obtención de robots que satisfacen las tareas para las que fueron programados a través de una mayor autonomía en la adquisición, organización y utilización del conocimiento y de sus habilidades. Algunas líneas de investigación actuales corresponden, por ejemplo, a las que tienen lugar en [7] sobre el uso de algoritmos evolutivos para el desarrollo de los controladores de los robots; la robótica cognitiva; y los sistemas de robótica colaborativa o sistemas multi-robot. En todas ellas, se aplican técnicas de inteligencia artificial para diseñar los controladores que doten a los robots del mayor grado de autonomía posible.
Algunos de los tipos de robots considerados por el Grupo de Robótica (GtRob) del Comité Español de Automática, son [8]:
•Los robots autónomos, que poseen la instrumentación necesaria para proporcionarles autonomía [8], es decir, que no requieran la supervisión humana. Entre estos están por ejemplo los vehículos aéreos autónomos o UAV (por sus siglas en inglés Unmanned Aerial Vehicles) como el de la figura 1, o vehículos submarinos autónomos o AUV (Autónomous Underwater Vehicle).

Figura 1. Robot Aéreo Autónomo (UAV) [8].
•Los robots de servicio, que de acuerdo con la Federación Internacional de Robótica (IFR) operan de manera parcial o totalmente autónoma, para desarrollar servicios útiles para el bienestar de los humanos y equipos; excluyendo las aplicaciones de manufactura. Se caracterizan por la falta de estructuración de su entorno y sus tareas a realizar, lo que obliga a los robots de servicio a contar con un grado de inteligencia que se traduce en el empleo de sensores y software adecuado para la toma rápida de decisiones [8].
•Los robots de educación, que son un tipo de robots de servicio diseñados para aportar elementos de ayuda que contribuyen a mejorar esta actividad [9]. Sirven como instrumento para provocar aprendizajes en los estudiantes adoptando como metodología la experimentación, que les permite aprender a concebir, manipular, controlar, operar y trabajar con robots pedagógicos [10].
•Los robots de entretenimiento u ocio; son un tipo de robots de servicio que contribuye, de alguna manera, en actividades de ocio de las personas. Pueden ser robots juguetes y mascotas que suelen incorporar capacidades avanzadas de interacción con el usuario, para lo cual deben incorporar modos de comportamiento evolutivo que les permitan tomar decisiones, en base a la respuesta que observa en el humano [8]. Este tipo de robots también abarca los utilizados en parques de atracciones o parques temáticos.
•Los robots humanoides, inspirados en las capacidades humanas y su aspecto, como el robot ASIMO de la figura 2 [8].

Figura 2. Robot humanoide ASIMO de Honda [8].
•Los robots personales, son un tipo de robot de servicio usualmente destinados para uso doméstico. Sirven a los humanos como ayudantes o colaborares en sus quehaceres o actividades diarias [8].
•Los sistemas multi robots o de robótica colectiva, que consiste en grupos de robots trabajando de manera conjunta para lograr objetivos comunes. Este tipo de sistemas se utilizan para resolver tareas que un solo individuo es incapaz de realizar, o bien, en tareas que se obtiene ganancia, en términos de tiempo, por ejemplo, si son ejecutadas por más de un individuo [11].
Robobo
Robobo es en un robot educativo que fue desarrollado por la compañía MINT y el Grupo de Integrado de Ingeniería (GII) de la Universidade da Coruña, y consiste en una base móvil como la de la figura 3, a la que se acopla un teléfono inteligente para realizar proyectos de robótica autónoma tanto en aulas, como a nivel particular y de investigación. El uso del teléfono inteligente en el Robobo hace que adquiera un largo ciclo de vida al ser tecnología en constante actualización, y provee a la plataforma con hardware de alto nivel en términos de sensores, comunicación y capacidades de procesamiento para crear lecciones más interactivas en las aulas y explotar la interacción entre humanos y robots [12].

Figura 3. Robot educativo Robobo [1].
Robobo se encuentra en el mercado a un precio de alrededor de €299 [13], el cual se considera bajo en comparación con robots similares como los mencionados en [2]. Cuenta con una serie de aplicaciones que permiten programar a Robobo fácilmente desde cualquier ordenador mediante conexión wifi, y con un diseño que le permite desempeñarse en sistemas multi robot. Actualmente, el uso de Robobo en las aulas y centros de investigación se ha dado en instituciones como el Centro de Enseñanza Infantil Primaria de Sigüeiro, ELDE college en los Países Bajos, el Centro de Formación Profesional Panevezio de Lituania, la Universidad de Ramon Llull campus la Salle y la Universidad de Porto de Portugal [14].
La programación del Robobo se puede dar en tres niveles distintos. El primero de ellos es mediante bloques de Scratch, orientado a programadores principiantes; el segundo se basa en JAVA Android, un nivel intermedio para estudiantes con experiencia en robótica para la programación basada en texto; y el tercero corresponde a ROS (Robot Operating System), que está enfocado a usuarios avanzados, como estudiantes de informática, ingeniería o robótica, o bien grupos de investigación en el área de la robótica autónoma y robótica colectiva [1].
Su proceso de recarga se lleva a cabo de manera individual y manual con un cargador USB estándar, como se indica en la figura 4, por lo que carece de autonomía. Por otro lado, a nivel comercial se dispone del paquete educativo de cuatro unidades de la figura 5. El paquete comercial incluye un cable USB tipo A Macho a micro USB tipo B Macho por cada base, sin el cargador de pared [13]; por lo cual los tiempos de carga del robot pueden variar de acuerdo con las características del cargador utilizado por el usuario final e implica un elevado número de cargadores de pared, lo cual es un inconveniente si el número de Robobos es mayor a las tomas de corriente disponibles en la sala.
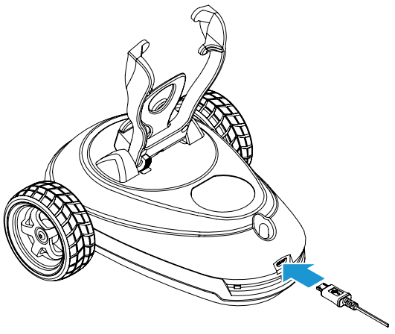
Figura 4. Carga de la batería del Robobo [15].

Figura 5. Paquete educativo del Robobo [13].
Ante la ausencia de un proceso de recarga autónomo, automatizado, homogéneo y simultáneo de las bases móviles del Robobo, se decidió desarrollar una base de recarga que permita la recarga autónoma y simultánea de cuatro plataformas robóticas móviles. Lo cual abre las posibilidades de programar el proceso de acuerdo con las prioridades y características de las tareas a realizar; por ejemplo, para permitir al usuario controlar el o los robots recargándose, el nivel de batería al que se acoplarán o desacoplarán los robots, para ejemplificar en las aulas un proceso de recarga autónomo, entre otros.
Sin embargo, para la automatización óptima del proceso de recarga se debieron considerar los requerimientos y factores generales, mecánicos y eléctricos que se indican a continuación:
Requerimientos Generales
•El precio de fabricación del prototipo está dentro del rango de los €50-70.
•El prototipo cumple con la normativa de Conformidad Europea (CE) para productos de media tensión.
•El diseño de la base de recarga no implica modificaciones de las características de la plataforma robótica móvil Robobo.
•Los robots pueden aproximarse y acoplarse al dispositivo siempre y cuando ambos se encuentren sobre una superficie con pocas irregularidades.
•Cuando una plataforma robótica se encuentra acoplada a la base de recarga, la base indica, de manera visual al usuario, si el Robobo está cargando o si concluyó su ciclo de carga.
•Siempre y cuando no exista un obstáculo entre el Robobo y la estación de recarga (como una pared, por ejemplo), el sistema de detección tiene un rango de cobertura de 360°.
Requerimientos Mecánicos
•Las dimensiones máximas de la estructura ensamblada son: 350 mm de alto, 450 mm de largo y 450 mm de ancho.
•La estructura está diseñada de tal forma que el usuario puede armar y desarmar el prototipo para el acceso y mantenimiento del circuito eléctrico.
Requerimientos Eléctricos
•La base de recarga se alimenta del sistema eléctrico de 110 a 240 V.
•El prototipo es capaz de recargar de manera homogénea y simultánea hasta cuatro Robobos.
•El sistema es capaz de suministrar una corriente homogénea a cada Robobo con un valor entre 1 a 1.5 A durante el proceso de carga, con 5 V.
•El diseño e implementación del circuito electrónico debe tomar en cuenta la posibilidad de una futura comercialización de cargadores individuales, por lo que puede subdividirse en cuatro partes o subestaciones independientes.
•La solución planteada debe de contar con protecciones del sistema eléctrico en caso de cortocircuito.
•El circuito eléctrico incluye LED rojos para indicar cuando una subestación de carga se encuentre encendida pero desocupada.
Los requerimientos mencionados se implementaron y validaron en [2], donde se describe en detalle el diseño final de la base de recarga con cuatro subestaciones eléctricamente independientes entre sí. Su circuito eléctrico se basó en el uso del amplificador operacional APX321 [16] configurado como comparador no inversor, y permite identificar tres estados de carga: a) carga en curso, b) tiempo de carga concluido, y c) disponible¸ como se muestra en el cuadro 1.
Cuadro 1. Estados de la subestación de carga [2].
|
Estado de la Subestación de Carga |
Color de LED encendido |
Modo de operación del LTC1733 |
IRobobo (mA) |
|
Carga en curso |
Verde |
Modo corriente constante |
1000 |
|
C/10 |
100 |
||
|
Tiempo de carga concluido |
Azul |
Modo Apagado |
2 |
|
Modo Suspensión |
0.005 |
||
|
Disponible |
Rojo |
No aplica |
No aplica |
A cada estado se le asoció el color de LED de la segunda columna de el cuadro 1, que permite a los usuarios y operadores reconocerles fácilmente. Además, Robobo permite ser programado para identificar colores en las imágenes que obtiene a partir de las cámaras del teléfono inteligente, por lo que puede reconocer los estados mencionados y actuar conforme a ellos. La segunda y tercera columna del cuadro 1 representan la configuración del cargador interno LTC1733 [17] que posee el Robobo para cargar la batería LiPo que posee.
Se implementó una carga por contacto entre el Robobo y la base, para lo cual fue necesario incorporar un adaptador como en la figura 6 para la conexión del puerto USB del robot con la subestación. El adaptador y la subestación cuentan con un contacto +Acople que permite identificar cuando un Robobo está conectado a la subestación de carga y encender ya sea los LED en verde o azul cuando el Robobo está conectado, y en rojo cuando no.
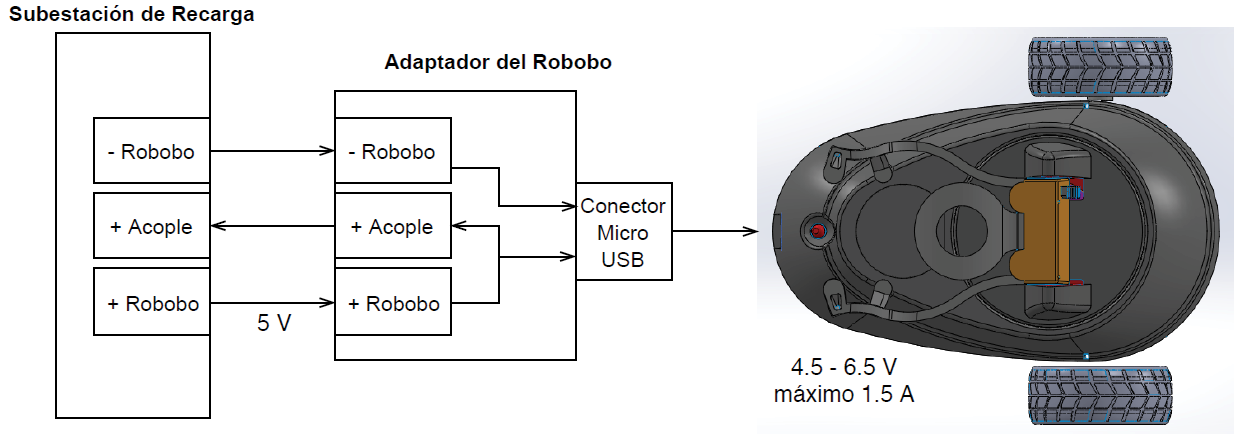
Figura 6. Sistema de carga con adaptador para el Robobo con tres contactos. [2]. Elaborado mediante Diagramly y SolidWorks.
Se propuso implementar el algoritmo mostrado en la figura 7 para el reconocimiento de la base de recarga, en el cual se utilizan las cámaras del teléfono inteligente para identificar etiquetas de tipo AprilTag que se deben incorporar en la estación de recarga. El sistema de detección y codificación de AprilTag permite estimar la posición de sus etiquetas en una imagen con un mejor desempeño en comparación con otros sistemas, como ARToolkit o ARTag, en cuanto a la tasa de falsos positivos y la exactitud de ubicación [18]. En la figura 8 se muestran ejemplos de las etiquetas que utilizan estos sistemas.
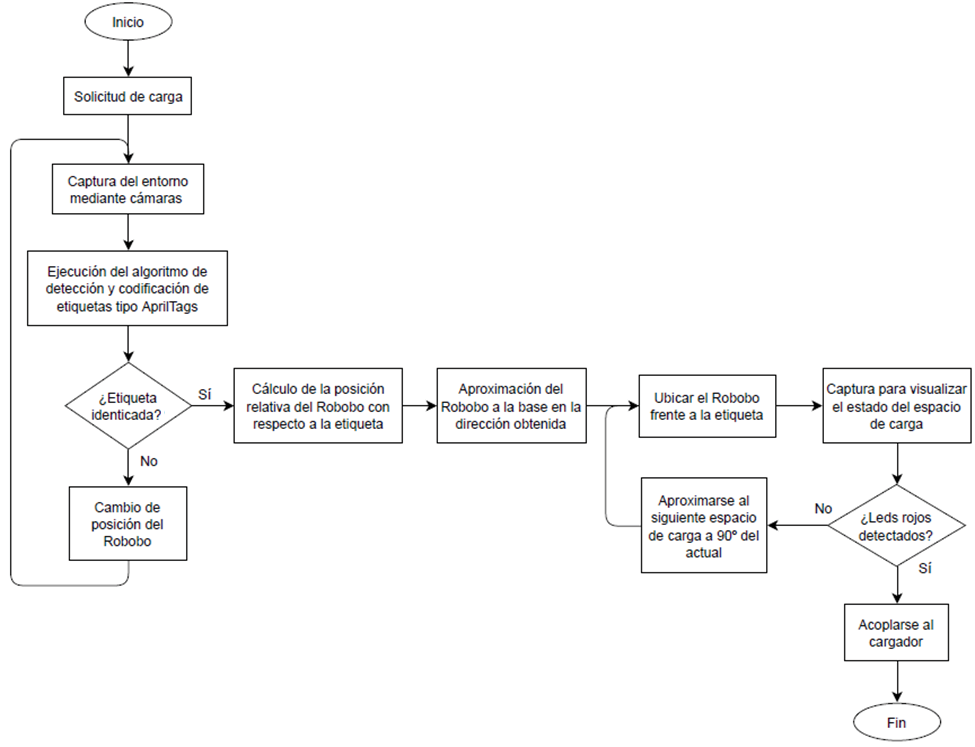
Figura 7. Proceso de aproximación a la base de recarga mediante reconocimiento de AprilTags [2]. Elaborado mediante Diagramly.
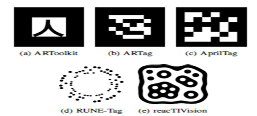
Figura 8. Comparación de etiquetas visuales fiduciales [19].
Se diseñó la estructura de la figura 9 de 344.96 mm de largo y ancho, con 317.6 mm de alto, con los planos mecánicos descritos en [2]. El prototipo se compone de 6 partes o piezas: una base principal, su tapa en forma de X o cruz, cuatro rampas desmontables, un cilindro, y un prisma con cuatro caras laterales para colocar los April Tag y que el sistema de detección permitiera un mayor rango de cobertura.
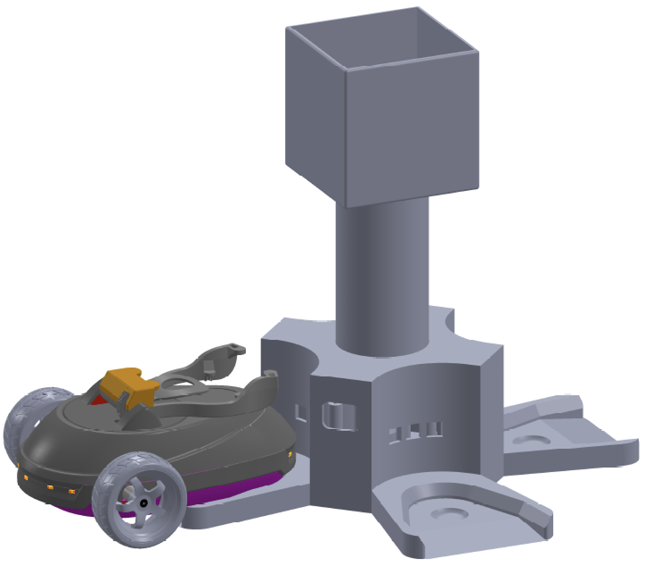
Figura 9. Propuesta de diseño cilíndrico y cubo con etiquetas de reconocimiento [2]. Elaborado mediante SolidWorks.
Las rampas permitieron disminuir el área de la estación en el suelo. Además, a estas se les añadió un escalón para el deslizador que posee el Robobo en su tapa inferior, que se puede observar en la figura 10, y así facilitar el posicionamiento del Robobo en la estación de recarga. Finalmente, la base principal alberga el circuito eléctrico con dos LED RGB por cada subestación para identificar los tres estados de carga antes mencionados en el cuadro 1.
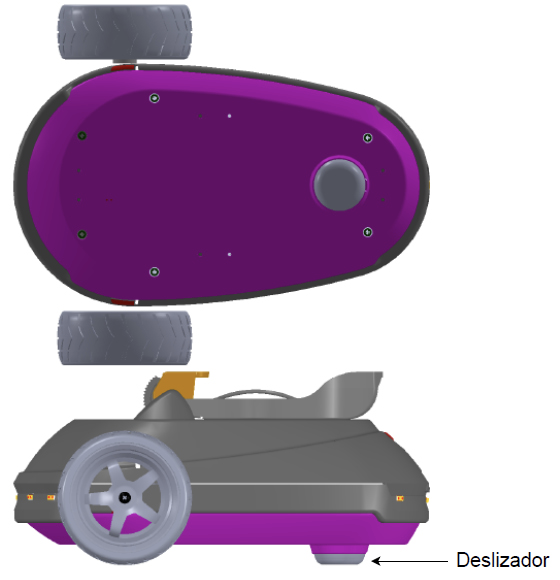
Figura 10. Detalle del deslizador del Robobo [2]. Elaborado mediante SolidWorks.
Conclusiones
•Se identificaron los tipos de robots considerados por el Grupo de Robótica (GtRob) del Comité Español de Automática que buscan incorporar tecnologías y algoritmos de funcionamiento que les permitan mayor autonomía.
•Se resumió la importancia de la implementación de un proceso de recarga autónomo para el Robobo.
•Se definieron los requerimientos generales, eléctricos y mecánicos necesarios para la recarga autónoma e independiente de una plataforma robótica móvil.
•Se resumió el diseño de un prototipo electromecánico para el acople y recarga simultánea de hasta cuatro plataformas robóticas Robobo, descrito por los planos eléctricos en [2], acorde con la normativa de Conformidad Europea CE para productos de media tensión, y los planos mecánicos del mismo documento que contemplan la implementación futura de un sistema de reconocimiento con etiquetas de tipo AprilTag.
Referencias
[1] MINT, «¿Qué es Robobo?,» [En línea]. Available: https://theroboboproject.com/que-es-robobo/. [Último acceso: 03 julio 2018].
[2] M. Vizcaíno, «Diseño de una Base de Recarga para la Plataforma Robótica Móvil Robobo,» 2019.
[3] Real Academia Española, «Robot».
[4] H. Moravec, «Robot,» 2019. [En línea]. Available: https://www.britannica.com/technology/robot-technology. [Último acceso: febrero 2019].
[5] A. Andrew, Behavior‐Based Robotics, Massachusetts: Cambridge, 1998.
[6] GII, «DREAM: Deferred Restructuring of Experience in Autonomous Machines.,» 2018. [En línea]. Available: http://www.gii.udc.es/proyectos/detalle/342. [Último acceso: febrero 2019].
[7] GII, «Robótica y Cognición,» 2014. [En línea]. Available: http://www.gii.udc.es/investigacion/detalle/5. [Último acceso: enero 2019].
[8] A. Barrientos, Fundamentos de robótica, 2 ed., McGraw-Hill, 2007.
[9] R. Aracil, C. Balaguer y M. Armanda, «Robots de servicio,» Revista Iberoamericana de Automática e Informática Industrial RIAI, vol. 5, nº 2, pp. 6-13, 2008.
[10] E. Ruiz, Los robots en la educación, Ediciones Díaz de Santos, 2007.
[11] L. Fernández y A. Muñoz, «Investigación sobre los Requisitos del Movimiento Colectivo Coordinado en un Sistema Multi-agente,» Revista Iberoamericana de Inteligencia Artificial, 2007.
[12] F. Bellas, M. Naya, G. Varela, L. Llamas y e. al., «The Robobo Project: Bringing Educational Robotics Closer to Real-World Applications,» A Coruña, 2017.
[13] MINT, «Tienda,» [En línea]. Available: https://theroboboproject.com/producto/pack-ensenanza-secundaria/. [Último acceso: 03 julio 2018].
[14] MINT, «Robobo en la educación,» [En línea]. Available: https://theroboboproject.com/educacion/. [Último acceso: enero 2019].
[15] MINT, «Manual de Usuario,» España.
[16] Diodes Incorporated, «APX321/APX358/APX324,» 2009.
[17] Linear Technology Corporation, «LTC1733 Monolithic Linear Lithium-Ion Battery Charger with Thermal Regulation.,» USA.
[18] E. Olson, «AprilTag: A robust flexible visual fiducial system,» University of Michigan, 2011. [En línea]. Available: https://ieeexplore.ieee.org/document/5979561. [Último acceso: 10 setiembre 2018].
[19] J. Wang y E. Olson, «AprilTag 2: Efficient and robust fiducial detection,» Michigan, Estados Unidos, 2016.
[20] MINT, «Especificaciones,» España.
1 Área académica de ingeniería mecatrónica. Instituto Tecnológico de Costa Rica. Costa Rica. Correo electrónico: monivii94@gmail.com