Diseño de una herramienta para la detección de fallos en sistemas multirrotores
Design of a tool for failures detection in multirrotor systems
Dilan Andrey Loría-Quesada1
Loría-Quesada, D.A. Diseño de una herramienta para la detección de fallos en sistemas multirrotores. Tecnología en Marcha. Vol. 34, especial. Movilidad Estudiantil. Octubre 2021. Pág 28-39. https://doi.org/10.18845/tm.v34i5.5913
https://doi.org/10.18845/tm.v34i5.5913
Palabras clave
UAV; Fallos; Red Neuronal; LSTM; GRU; MAVLink.
Resumen
Los vehículos no tripulados (UAV) con multirrotores, cuentan con un sistema de control que se enfoca principalmente en buscar la estabilidad del vehículo durante el vuelo, sin embargo, no le permite detectar o prever cuando se presenta un fallo, y muchas veces no responde de la mejor manera. En este artículo se presenta inicialmente 9 categorías de fallos que se podrían encontrar durante el vuelo de un UAV, además se presenta el diseño de una red neuronal recurrente capaz de detectar patrones en las series de datos tomadas de un conjunto de sensores, montados sobre el dron. Se presenta la comparación de dos redes diferentes, la LSTM y la GRU, donde se demuestra que la red GRU es la más apropiada para este tipo de problema, obteniéndose hasta un 97% de éxito con los datos de entrenamiento utilizados. Además, se propone una respuesta a los fallos por medio de un protocolo de comunicación llamado MAVLink, que informaría al usuario de la presencia del fallo, además de desconectar el motor de ser necesario.
Keywords
UAV; Failures; Neural Network; LSTM; GRU; MAVLink.
Abstract
Unmanned vehicles (UAVs) with multirotors, have a control system that focuses mainly on seeking vehicle stability during flight, however, it does not allow it to detect or predict when a failure occurs, and often does not respond in the best way. This article initially presents 9 categories of failures that could be found during the flight of a UAV, as well as the design of a recurrent neural network capable of detecting patterns in the data series taken from a set of sensors, mounted on the drone. The comparison of two different networks is presented, the LSTM and the GRU, where it is shown that the GRU network is the most appropriate for this type of problem, obtaining up to 97% success with the training data used. In addition, a response to failures is proposed through a communication protocol called MAVLink, which would inform the user of the presence of the failure, in addition to disconnecting the motor if necessary.
Introducción
Fallos en vehículos multirotores
Como se menciona en [1] se puede definir un multirrotor o multicóptero como un dispositivo que tiene múltiples hélices o propulsores de ascenso, lo que lo diferencia del helicóptero, el cual solo cuenta con un motor para esta función. Otra diferencia radica en la ausencia de un rotor de cola, que en los helicópteros se utiliza para dar un control de guiñada y contrarrestar el par inducido por el rotor principal.
Los fallos más comunes en este tipo de vehículos se dan principalmente en sus componentes móviles, que son los motores y las hélices. El mayor problema que afrontan estos vehículos es que la principal función de sus sistemas de control es la de mantener la estabilidad y esto lo realizan demandando más o menos velocidad a cada uno de los motores, no explorando directamente la causa de la inestabilidad, la cual en ocasiones no puede ser resuelta por el sistema de control actual, como se describe en [2].
Los fallos que se presentan en los vehículos multirotores, se dan principalmente en el sistema de propulsión, que abarca el motor sin escobillas, las hélices, controlador de velocidad y batería. De manera general un vehículo de estos se compone de los elementos presentes en la figura 1.
A continuación, se describen los principales fallos que se podrían presentar durante el vuelo y que afectan directamente el sistema de propulsión:
•Motor dañado: esta es la primera categoría de fallo expuesta y hace referencia a la pérdida de un motor, lo que implica su completa detención. Por lo general los motores se dañan producto de cortos circuitos, por lo que pueden elevar su temperatura y valores de corriente y luego de un instante a otro car la velocidad y la corriente. En [3] se menciona que este corto circuito se da producto del desgaste de los devanados del motor.
•ESC dañado: el controlador de velocidad o ESC se puede dañar por la misma razón que el motor, producto de un corto circuito que supere su corriente nominal. En el trabajo de [3], este elemento se puede degradar con el tiempo, produciendo la regulación de corriente se vea alterada y pueda conducir al daño de componentes.
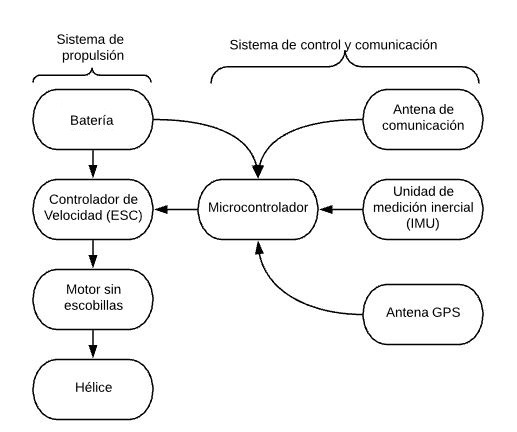
Figura 1. Elementos de un sistema multirrotor.
•Batería dañada: los vehículos multirotores utilizan en su mayoría, baterías de polímero de litio (LiPo), las cuales también se pueden dañar durante el vuelo, en [4] se menciona que los fallos en las baterías se dan principalmente cuando se supera la tasa de descarga de esta, es decir que se les demanda más corriente de la que pueden entregar. La pérdida de la batería se refleja en una caída en la tensión y un aumento en la temperatura de la batería.
•Daño de rodamientos: como se menciona en [5], estos elementos por lo general fallan debido a fatiga, debido a la tensión continua a la que son sometidos. Se produce un desprendimiento de pequeñas piezas, en un proceso conocido como descamación, esto puede conducir a la interrupción del movimiento hasta el punto de bloquear el motor.
•Rotura o aflojamiento del soporte: los motores son elementos independientes del marco del vehículo, por lo que estos se conectan mediante uniones mecánicas como tornillos, sin embargo, como se menciona [3] en ocasiones estas uniones se pueden aflojar, causando inestabilidad en el vehículo, además en ocasiones la fuerza ejercida por el motor puede incluso romper el soporte al que esta se sujetado.
•Desmagnetizacion: este es un fenómeno que ocurre cuando el imán permanente del motor sin escobillas se expone a un campo magnético que lo hace perder sus propiedades magnéticas, también pasa cuando se expone a altas temperaturas y como se menciona en [6] esto conduce a un aumento de torque y la demanda de corriente, para compensar la pérdida de atracción del imán con la bobina.
•Desconexión de fases: este es un fenómeno que ocurre cuando se desconectan una o dos de las tres fases que alimentan el motor, en le trabajo de [7], se describe que al existir una fase ausente, el motor tarta de compensar utilizando las restantes, por lo que se eleva la demanda de corriente, su comportamiento es muy similar a la desmagnetización, debido a que este se puede ver como una desmagnetización de uno de los bobinados del motor.
•Motor bloqueado: como se mencionó el caso de la descamación de los rodamientos, muchos factores externos pueden producir un bloqueo del motor, lo que lo puede llevar a percibir esto como una carga infinita y puede desencadenar en un corto circuito por la alta demanda de corriente en buscar de lidiar con la carga.
•Hélice desprendida: en [2] se describe los problemas referentes a las hélices, el primero es el desprendimiento de esta, debido a una mala instalación o cualquier otro factor externo. La ausencia de la hélice produce un aumento en a velocidad, en búsqueda del sistema por recuperar estabilidad, sin embargo, se da con un bajo nivel de corriente, ya que la carga es mínima.
•Rotura de hélice: el segundo problema es cuando se da una rotura parcial de la hélice, fenómeno que produce una inestabilidad en el vuelo además de reducir la corriente levemente y aumentar la velocidad, en búsqueda de compensar el área de empuje perdida.
•Hélice en dirección opuesta: finalmente se consideró un fallo más, el cual hace referencia a cuando se da una incorrecta instalación de la hélice, y se pone en sentido opuesto, si bien esto solo ocurriría por un descuido, existe la posibilidad, por lo que se considera este fallo, el cual se vería reflejado en una inestabilidad del vehículo.
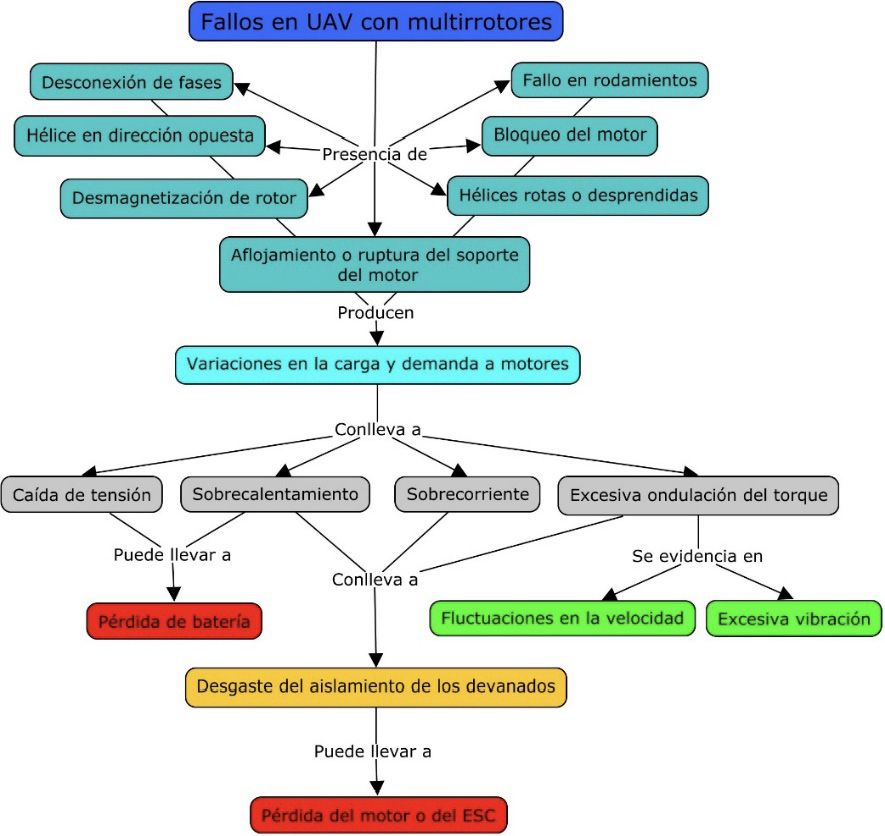
Figura 2. Relación entre los fallos y las variables de medición.
En la figura 2 se resumen en un esquema los fallos descritos además de las variables de medición que pueden revelar información de la presencia de estos. Se establece como variables importantes la tensión, la corriente, la temperatura, la vibración y la velocidad.
Inteligencia artificial en la detección de fallos
En el trabajo de [8] se menciona que los métodos tradicionales ara la detección de anomalías se basan en las características específicas del dominio, lo que requiere un conocimiento en el área de estudio, para establecer valores de umbrales o otras variables que permitan la detección de las anomalías. Esto no resulta muy eficiente, ya que no siempre se cuenta con un experto en el tema en el desarrollo de estas herramientas, la inteligencia artificial trata de solventar esto con la utilización de estructuras como lo son las redes neuronales, las cuales se pueden entrenar con datos recolectados, hasta el punto en el que esta es capaz de encontrar patrones para la detección de los fallos.
Cuando los datos que se van a analizar poseen una naturaleza temporal, como lo son los recolectados por los sensores de un sistema multirrotor, la mejor opción es utilizar una red neuronal recurrente. Como se describen en el trabajo de [8], una red neuronal recurrente se compone de múltiples copias del mismo módulo, donde cada uno de estos es una red neuronal que pasa su salida una a un módulo anterior. Son redes con dos entradas, el presente y el pasado inmediato, dado que cada uno de los módulos sirve como una celda de memoria que almacena el estado anterior. Esta estructura la convierten en una red ideal para el análisis de datos secuenciales, con una dinámica temporal, como lo son los datos de series temporales de un sensor. Las redes recurrentes simples tienen el problema de contar con una memoria de corto plazo, por lo que solo detectan la dependencia del tiempo en secuencias bastante cortas, debido a esto se ha le han realizado modificaciones para crear arquitecturas con una mayor capacidad de memoria. Las dos arquitecturas que más sobresalen son la Long-Short Term Memory (LSTM) y la Gated Recurrent Unit (GRU). Son arquitecturas similares, sin embargo, la LSTM es mucho más compleja, lo cual la hace más potente, por otra parte, se considera que la GRU es más eficiente computacionalmente.
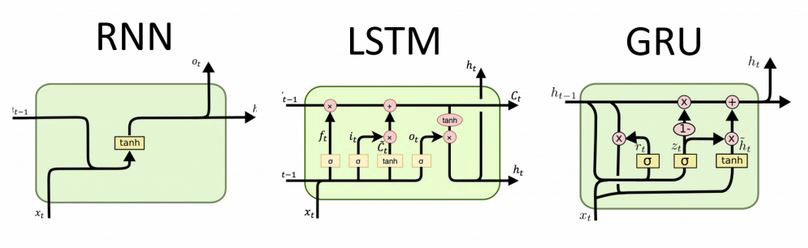
Figura 3. Arquitecturas de una red recurrente sencilla, una LSTM y una GRU [9].
En la figura 3 se pueden apreciar la estructura de una neurona en red neuronal recurrente sencilla, una LSTM y una GRU. En el trabajo de [9] se comparan estas redes y se menciona que la principal deficiencia de la red recurrente sencilla es que no permite trabajar con muchos datos, al procesar una salida se toma en consideración únicamente las salidas mas recientes, si bien se crea una relación entre los datos, entre mas alejados estén entre ellos, menos impacto tienen en el cálculo del estado actual. Es por eso por lo que nacen la red LSTM y la GRU, que en esencia tienen el mismo funcionamiento, ya que incorporan el concepto de compuertas.
Ambas redes poseen una celda de memoria, donde se almacenan todas las salidas de los instantes anteriores, sin embargo, con el objetivo de que esta celda no crezca demasiado, estas redes incorporan las compuertas de olvido y entradas para la LSTM y las de reinicio y actualización en la GRU. Aunque tienen diferente nombre su función es prácticamente la misma, la primera le permite a la red olvidar valores de la memoria, en cada instante de tiempo de analiza cuales datos ya no tiene importancia en la toma de datos y esta compuerta se encarga de borrarlos. Luego esta la compuerta de actualización que es la que decide que valores agregar a la memoria. La principal diferencia entre estas redes es que la LSTM posee una compuerta de salida independiente de la celda de memoria, mientras que la GRU solo cuenta con la celda de memoria o de estado oculto. Esto hace a la LSTM una red mucho más robusta y con una estructura más completa. Aunque la GRU es más sencilla, dependiendo de la aplicación puede trabajar incluso mejor, ya que básicamente posee las mismas compuertas y forma de operar, haciéndolo incluso de manera mas eficiente, ya que demanda menos recurso computacional.
Materiales y métodos
El sistema de predicción, detección y corrección de fallos se compone de tres subsistemas como se observa en la figura 4. Primero de un sistema de adquisición de datos, el cual se compone de los sensores que harán lecturas de las variables de vuelo. Luego un sistema o algoritmo de predicción y detección, el cual consiste en la red neuronal que se encargará de la interpretación de los datos recolectados, para la clasificación de fallos. Finalmente habrá un sistema de corrección, encargado de tomar acciones en presencia de los fallos y de comunicarlos al usuario.
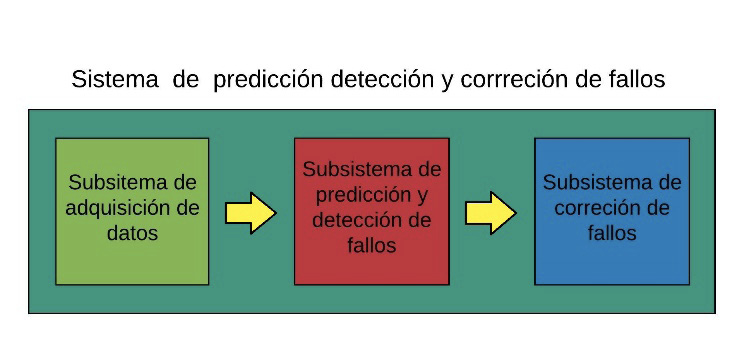
Figura 4. Relación de los sistemas implementados para el sistema de predicción, detección y corrección de fallos.
Para el sistema de adquisición de datos se utilizan los siguientes materiales:
•Microcontrolador
•Sensor de corriente
•Sensor de velocidad
•Sensor de temperatura para el motor y para la batería
•Sensor de vibraciones
•Sensor de voltaje
Para la corrección se plantea utilizar un relé, encargado de cortar la alimentación en caso de ser necesario. Además, el sistema de comunicación se hará por medio del protocolo de comunicación MAVLink, el cual permite comunicar el PixHawk, utilizado como controlador de vuelo, con una computadora en tierra. Este protocolo permite enviar mensajes prestablecidos, los cuales son leídos en con ayuda del programa de vuelo Mission Planner de Ardupilot.
Finalmente, en el desarrollo de la red neuronal se propone utilizar una arquitectura como la que se ve en la figura 5. Aunque esta imagen describe la red LSTM, se utiliza la misma para la GRU.
En el cuadro 1 se pueden observar los parámetros utilizados en la configuración de ambas redes neuronales, tanto la GRU como la LSTM. Para el entrenamiento de ambas redes se utilizará un conjunto de 15000 datos, el cual se dividió en un 20% para prueba y 80% para entrenamiento, además de un conjunto más pequeño de 5000 datos, el cual se utilizará para la validación final, una vez que ambas redes han sido entrenadas. Estos datos fueron obtenidos de vuelos realizados en el pasado, con los sensores que lleva a bordo el PixHawk, además para generar los datos de fallos se modificaron, en base en la teoría, los datos de vuelo en funcionamiento normal.
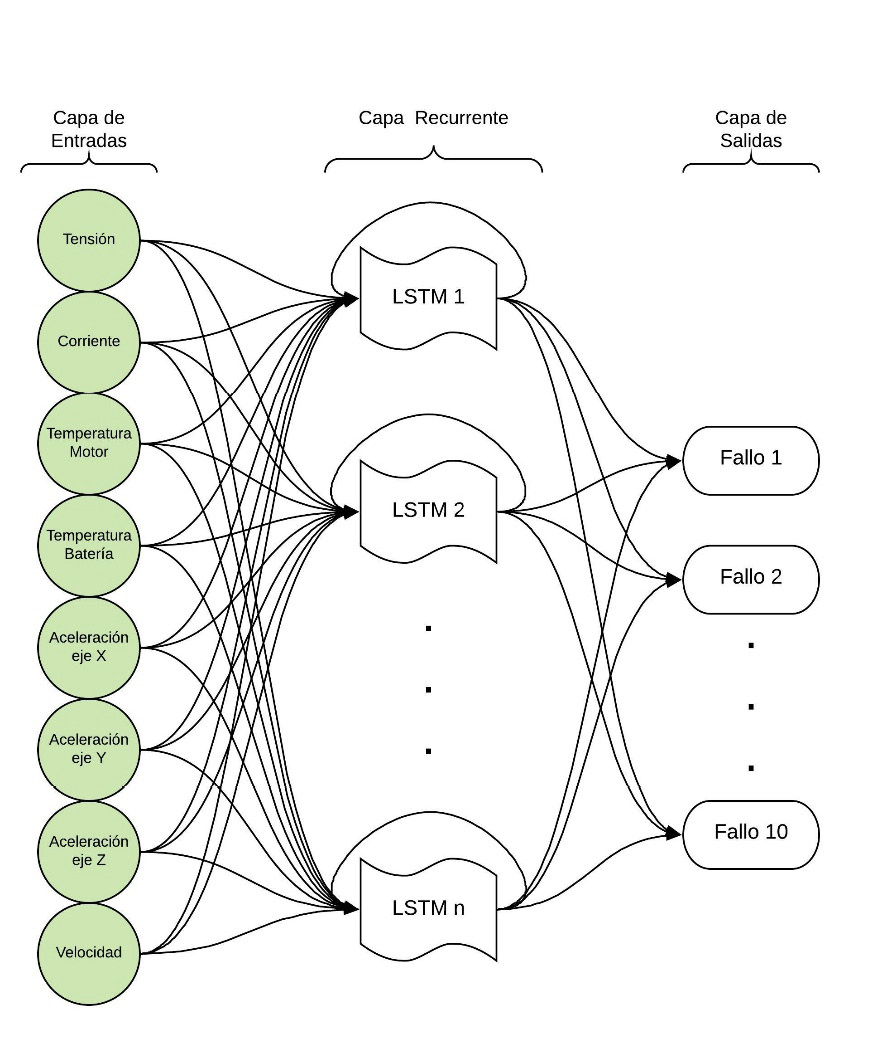
Figura 5. Estructura de la red neuronal implementada.
Cuadro 1. Configuración de red neuronal propuesta.
|
Parámetro |
Valor o configuración |
|
Optimizador |
Adam |
|
Función de error |
Entropía cruzada binaria |
|
Función de activación de la capa de salida |
Sigmoide |
|
Número de capas ocultas |
2 |
|
Número de neuronas de las capas ocultas |
30 |
|
Número de épocas |
100 |
|
Tamaño del lote |
12 |
Resultados
En la figura 6 se puede observar cómo es el montaje de sistema de recolección de datos, además se ve el relé encargado de la interrupción de la corriente cuando se detecta un fallo. Este sistema se comunica por medio de una faja de cables a un segundo PCB, ubicado en el centro del vehículo, el cual contiene el microcontrolador que analiza los datos y que corre la red neuronal. En esta figura se puede observas 2 grupos de pines en el extremo del PCB los cuales corresponden a los sensores de velocidad y de temperatura que se colocarían sobre el motor en el extremo del brazo del dron.
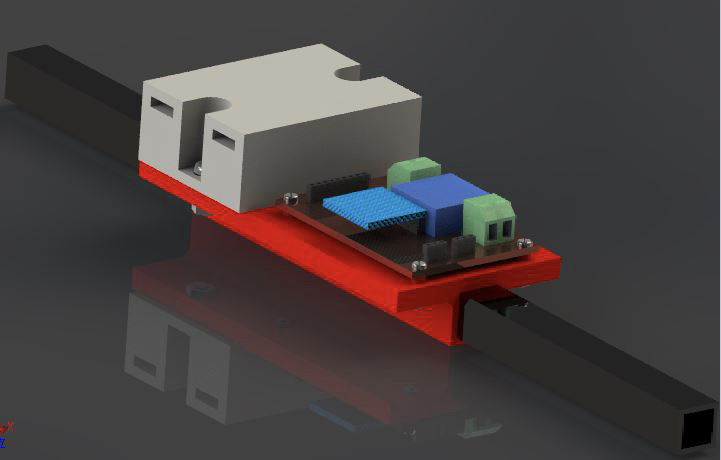
Figura 6. Montaje de los sensores sobre el brazo del multirrotor.
Esta estructura se realiza con impresión 3D y posee uniones mecánicas de tornillos con tuercas, las cuales fueron sometidas a un estudio de esfuerzos, con el objetivo de confirmar que soportarían las fuerzas a las que se ve sometidas la estructura. En la figura 7 se observa cómo se realizó esta simulación, se simulo el brazo del dron como un a barra empotrada en voladizo, la cual se ve afectada por la fuerza de gravedad y por la fuerza de empuje del motor, en este caso se utilizo la fuerza de empuje máximo listada en la hoja de datos del motor que correspondía a 6N.
Los resultados de esta simulación arrojaron que las piezas de impresión 3D trabajan con un factor de seguridad de 13.58, el brazo de aluminio opera con un margen de 26.56 y el PCB tiene un factor de 7.33. Por otra parte, los elementos de unión, como lo son los tornillos y las tuercas resultaron ser los que se someten a un mayor esfuerzo, dando resultados para el factor de seguridad de 1.97 y 2.13 respectivamente. Siendo 1.97 el factor de seguridad mas bajo a nivel global en la estructura, sin embargo, aunque parece un valor bajo este representa un margen de 167.4MPa entre el esfuerzo para el que se diseña y el que se necesitaría para que falle, lo cual es un valor sumamente alto y representa que la estructura podría soportar casi el doble de esfuerzo el que sufre.
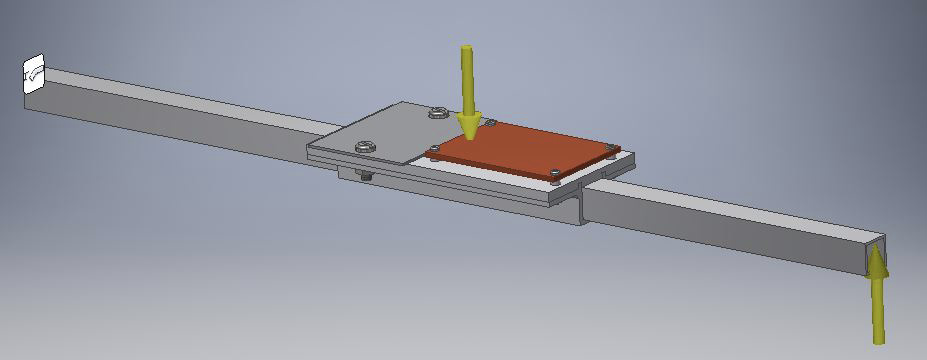
Figura 7. Simulación realizada para comprobar esfuerzos en la estructura.
En la figura 8 se pueden observar los resultados de las redes implementadas, como se observa ambas obtienen valores de precisión por encima de 90%, lo cual indica que la red es capaz de detectar más de un 90% de los errores que se presentan el vehículo, al menos en los datos utilizados para el entrenamiento de la red. Además, se ven las gráficas de error con valores menores a 0.1, que en términos de este trabajo donde la salida se espera que este entre 1 y 0, hablar de errores de menos de 0.1 es bastante favorable.
Dado que las redes, pueden variar sus resultados de un entrenamiento a otro, se optó por realizar 10 pruebas a ambas redes, de manera que se comprobara si la selección de parámetros había sido la correcta y no solo si se había tenido suerte en la primera prueba. Para estas pruebas también se utilizaron los 5000 datos de validación y los promedios obtenidos se observan en el Cuadro 2.
Algo a destacar de los promedios calculados, es que la red GRU es la que alcanza el valor de precisión más alto de todos, en su etapa de entrenamiento con un 97.74%, además es la red que obtiene en los valores más altos en cada una de las etapas, demostrando que es la red que mejor se desempeña para este tipo de problema de detección de ellos. Esto queda aún más claro al observar la figura 9, donde de una manera mucho más visual se puede notar como en general, los datos de precisión obtenidos con la red GRU son más alto que los obtenidos con la red LSTM, en cada uno de los distintos tipos de datos.
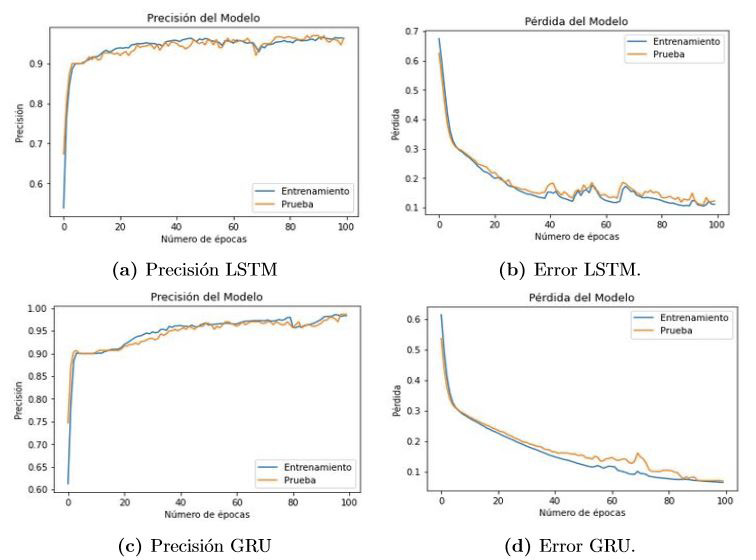
Figura 8. Resultados de precisión y error para los modelos de LSTM y GRU implementados.
Cuadro 2. Configuración de red neuronal propuesta.
|
Tipo de Dato |
Precisión [%] |
Desviación estándar precisión [%] |
Error |
Desviación estándar error |
|
Entrenamiento LSTM |
94.85 |
1.48 |
0.13 |
0.05 |
|
Entrenamiento GRU |
97.74 |
0.87 |
0.07 |
0.01 |
|
Prueba LSTM |
94.73 |
1.40 |
0.14 |
0.05 |
|
Prueba GRU |
96.76 |
1.05 |
0.09 |
0.02 |
|
Validación LSTM |
92.82 |
0.19 |
0.01 |
0.05 |
|
Validación GRU |
94.34 |
1.83 |
0.15 |
0.05 |
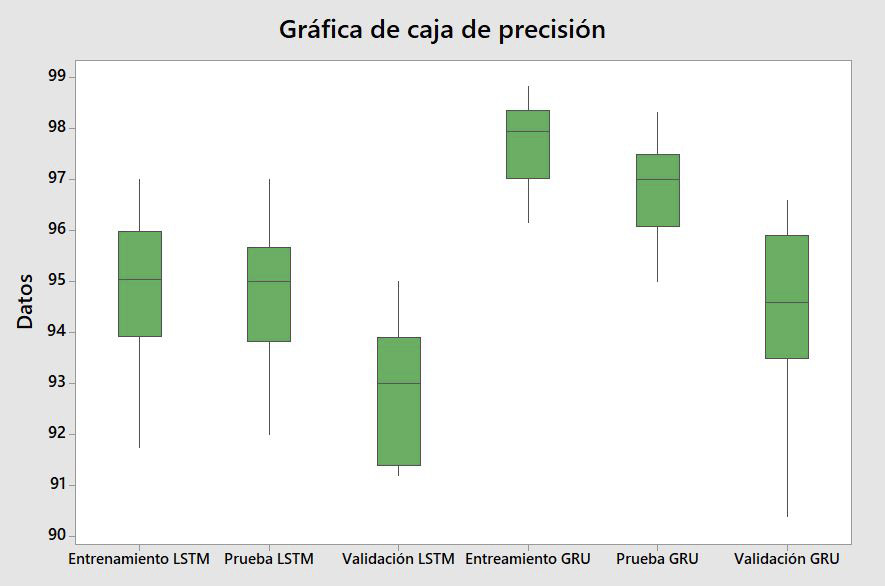
Figura 9. Comparación de la precisión obtenida con las dos redes en cada uno sus tipos de datos.
Conclusiones y recomendaciones
Conclusiones
Este trabajo permitió el desarrollo de un sistema capaz de la detección y clasificación de fallos, en UAVs con multirrotores, por medio de la implementación de una red neuronal recurrente, la cual opera sobre datos que se recolectan en tiempo real durante el vuelo.
Para poder diseñar el sistema de detección, primero se realizó una categorización y conceptualización de los todos los posibles fallos en el vehículo, al menos en el subsistema de propulsión, que es sobre el que trabaja el proyecto. Al final se establecieron 9 categorías de fallo y una de funcionamiento normal, la conceptualización permitió también escoger las variables en las cuales se reflejan estos fallos, de manera que se pudo escoger sensores adecuados para la toma de datos.
Se llevó a cabo un estudio por medio de simulaciones que avalan el concepto de los elementos se sujeción y aseguran su funcionamiento con al menos un factor de seguridad de 1.97.
Posteriormente se diseñó la red neuronal, encargada de la detección y clasificación de los fallos. Para esto se diseñaron dos modelos, uno con capas ocultas LSTM y otro con capas GRU, ambas redes recurrentes, donde se obtuvieron para los dos resultados de precisión muy altos, sin embargo, la red GRU destaca con un promedio de precisión de 97.7% en los datos de entrenamiento y un 94.3% en los datos de validación.
Recomendaciones
•Primeramente, se recomienda probar el sistema propuesto en un vuelo real, de manera que se puede comprobar su nivel de precisión al enfrentarse a datos reales.
•En busca de mejorar la precisión de la herramienta de predicción, se propone recolectar un gran número de datos reales y recolectados por el sistema de adquisición de fallos, provocando cada uno de los fallos propuestos, de manera que se pueda reentrenar la herramienta con estos nuevos datos.
•Probar la red con conjuntos de datos de distintos tamaños, actualmente se entrenó para operar con conjuntos de 100 datos, sin embargo, se puede probar el efecto de aumentar o disminuir este valor una vez que se tenga datos reales, considerando que se podrían obtener buenos resultados con una menor cantidad de datos, lo que aceleraría la toma de decisiones.
Referencias
[1] T. Audronis, Building Multicopter Video Drones. Packt Publishing Ltd, 2014.
[2] P. Misra, G. Kandaswamy, P. Mohapatra, K. Kumar, and P. Balamuralidhar, “Structural health monitoring of multi-rotor micro aerial vehicles”, DroNet 2018 - Proceedings of the 2018 ACM International Conference on Mobile Systems, Applications and Services, pp. 21-26, 2018. doi: 10.1145/3213526.3213531.
[3] G. E. G. Jr, C. S. Kulkarni, E. Hogge, A. Hsu, and N. Ownby, “A Study of the Degradation of Electronic Speed Controllers for Brushless DC Motors”, 2017.
[4] Roger, “A Guide to Understanding LiPo Batteries”, Roger’s Hobby Center, pp. 1-9, 2018. [Online]. Available: https://rogershobbycenter.com/lipoguide.
[5] S. Rajagopalan, J. M. Aller, J. A. Restrepo, T. G. Habetler, and R. G. Harley,”Detection of rotor faults in brushless DC motors operating under nonstationary conditions”, IEEE Transactions on Industry Applications, vol. 42, no. 6, pp. 1464-1477, 2006, issn: 00939994. doi: 10.1109/TIA.2006.882613.
[6] D. K. Athanasopoulos, P. D. Karagkounis, J. C. Kappatou, M. Ieee, and S. Tsotoulidis, “Demagnetization Faults Analysis in a BLDC Motor for Diagnostic Purposes”, 2014 International Conference on Electrical Machines (ICEM), pp. 1862-1868, 2014. doi: 10.1109/ICELMACH.2014.6960437.
[7] W. H. Kersting, “Causes and effects of single-phasing induction motors”, IEEE Transactions on Industry Applications, vol. 41, no. 6, pp. 1499-1505, 2005, issn: 00939994. doi: 10.1109/TIA.2005.857467.
[8] A. Verner, “LSTM Networks for Detection and Classification of Anomalies in Raw Sensor Data” by in Computer Science College of Engineering and Computing, no. May 2019. doi: 10.13140/RG.2.2.19049.54888.
[9] C. Olah, Understanding LSTM Networks, 2015. [Online]. Available: http://colah.github.io/posts/2015-08-Understanding-LSTMs/ .
1 Ingeniería Mecatrónica, Instituto Tecnológico de Costa Rica-Grupo Integrado de Ingeniería de la Universidad de la Coruña, España. Correo electrónico: dilan.loria@gmail.com https://orcid.org/0000-0002-0832-6553
https://orcid.org/0000-0002-0832-6553