Desarrollo de Plataforma UAS de Ala Fija con ascenso/descenso vertical para aplicaciones fotogramétricas
Development of Vertical Takeoff and Landing fixed-wing UAS Platform for Photogrammetry Applications
Kenny Lee-Quirós1, Juan Gabriel Rodríguez-Rivera2,
Amit Ferencz-Appel3, Sergio Arriola-Valverde4,
Jorge Umaña-Soto5, Renato Rimolo-Donadio6
Fecha de recepción: 18 de setiembre, 2021
Fecha de aprobación: 22 de marzo, 2022
Lee-Quirós, K; Rodríguez-Rivera, J.G; Ferencz-Appel, A; Arriola-Valverde, S; Umaña-Soto, J; Rimolo-Donadio, R. Desarrollo de plataforma UAS de Ala Fija con ascenso/descenso vertical para aplicaciones fotogramétricas. Tecnología en Marcha. Vol. 36, No 1. Enero-Marzo, 2023. Pág. 152-162. https://doi.org/10.18845/tm.v36i1.5872
https://doi.org/10.18845/tm.v36i1.5872
Palabras clave
Ala fija; despegue y aterrizaje vertical; drones; fotogrametría; sensores remotos; sistema aéreo no tripulado.
Resumen
En este artículo se describe el proceso de desarrollo de una plataforma de ala fija con capacidad de despegue/aterrizaje vertical (VTOL) para aplicaciones fotogramétricas a partir del controlador abierto con autopiloto Pixhawk 2. Se explica la funcionalidad general y los resultados obtenidos con la integración de la plataforma, así como los resultados obtenidos con vuelos de prueba. El prototipo desarrollado fue capaz de ejecutar misiones autónomas y obtener imágenes georreferenciadas con calidad fotogramétrica para la conformación de productos tales como ortomosaicos o modelos de elevación digital (DEM).
Keywords
Drones; fixed wing; photogrammetry; remote sensors; unmanned aerial system; vertical take-off and landing.
Abstract
This paper describes the development of a fixed-wing vertical-takeoff-and-landing (VTOL) platform for photogrammetric applications with the open autopilot Pixhawk 2. The general functionality and the results obtained with the integrated platform are explained, as well as the results obtained through test flights. The developed prototype was able to execute autonomous missions and obtain georeferenced images with good photogrammetric quality for the conformation of products such as orthomosaics digital elevation models (DEMs).
Introducción
La Sociedad Americana para la Fotogrametría y el Sensores Remotos (ASPRS) define a la fotogrametría como “el arte, ciencia y tecnología de obtener información confiable de objetos físicos y el ambiente mediante procesos de mediciones e interpretación de imágenes y patrones de energía electromagnética radiante y otros fenómenos” [1]. La fotogrametría se descompone etimológicamente como “foto” que quiere decir luz, “gram” que es dibujo y “metría” que es la medición.
La intención de desarrollar una plataforma VTOL de ala fija surge a partir de las necesidades del Laboratorio de Fotogrametría (UASTEC), del Instituto Tecnológico de Costa Rica (ITCR), de contar con aeronaves capaces de cubrir áreas de terreno más extensas. Actualmente, dicho laboratorio dispone de sistemas multirrotores como el Matrice 600 de DJI, que tiene una autonomía cercana a los 25 minutos y con la es posible llevar a cabo mapeos con coberturas en el orden de las decenas de hectáreas. En una misión a una altitud de 100 metros, por ejemplo, es posible abarcar alrededor de 20 hectáreas de aproximadamente.
Las plataformas multirrotor tienen la característica de tener un despegue de forma vertical, que les permite despegar en espacios pequeños, además son altamente maniobrables debido al control fino que se puede realizar al variar las velocidades de los diferentes motores con los que cuentan, lo que permite volar a baja altura y alcanzar altas resoluciones espaciales (cercana a 1 cm/pix) con los sensores de imagen a bordo. Sin embargo, esto genera gran consumo de energía debido a que se debe mantener todos los motores girando a alta velocidad a lo largo todo el vuelo.
Las plataformas de ala fija proporcionan mayor autonomía de vuelo, y recientemente en UASTEC se han explorado algunas alternativas [2]-[6]. Por ejemplo, para un sobrevuelo de alrededor de 100 hectáreas se requirieron 17 minutos a una altitud de 180 metros [6]. Las plataformas de ala fija tienen la ventaja respecto a el consumo de energía, ya que la sustentación es generada por las alas y no por los motores; además, poseen una mejor aerodinámica y menor cantidad de motores. La principal desventaja que presenta es que los despegues y aterrizajes son más complejos o imposibles cuando no se dispone de un área libre para realizarlos.
Las plataformas VTOL ofrecen una solución intermedia al hibridizar las características de los multirrotores para el despegue y aterrizaje, y las de ala fija de volar bajo el principio de sustentación tradicional que utilizan aeronaves con alas. Esto permite realizar las maniobras de despegue y aterrizaje de forma vertical, como lo realizan los multirrotores, y durante el vuelo se realiza la transición al modo ala fija, que le permite mejorar la autonomía y mapear amplias zonas de terreno.
En este trabajo se detalla el desarrollo de una plataforma VTOL, donde se considera el diseño eléctrico, la integración de éste a un cuerpo de aeronave, su configuración y ejecución de misiones fotogramétricas autónomas utilizando insumos de hardware y software abiertos. La información presentada a continuación fue parte de un proyecto final para optar por el grado de Licenciatura en Ingeniería Electrónica [7].
Desarrollo de una plataforma VTOL de ala fija
En el mercado existen diferentes plataformas VTOL, pero estas usualmente tienen un costo elevado y, en general, es difícil adaptarles nuevos sensores y funcionalidades. Este proyecto buscar implementar una plataforma UAS VTOL de bajo costo y configurable, basado en un controlador de código abierto. El trabajo se desarrolló utilizando el Pixhawk 2 como controlador central de vuelo y autopiloto, sobre un cuerpo de aeronave del tipo Skywalker con cuatro alerones y tres rotores, dos de los cuales se ubican en las alas y son móviles para transicionar entre el modo ala fina y multirrotor.
En el diagrama de la figura 1 se muestra la interconexión de los diferentes bloques del sistema electrónico y mecánico que componen la plataforma VTOL de ala fija, y en la figura 2 se muestra físicamente el resultado de la integración de la aeronave. Cada uno de los bloques se agrupa en seis etapas centrales, a saber: controlador central, sección de sensores, de actuadores, comunicación por radio frecuencia (RF), sección de potencia y sección de alimentación, las cuales se describen en más detalle a continuación. El proceso de selección de componentes y sus especificaciones se pueden consultar en la referencia [7].
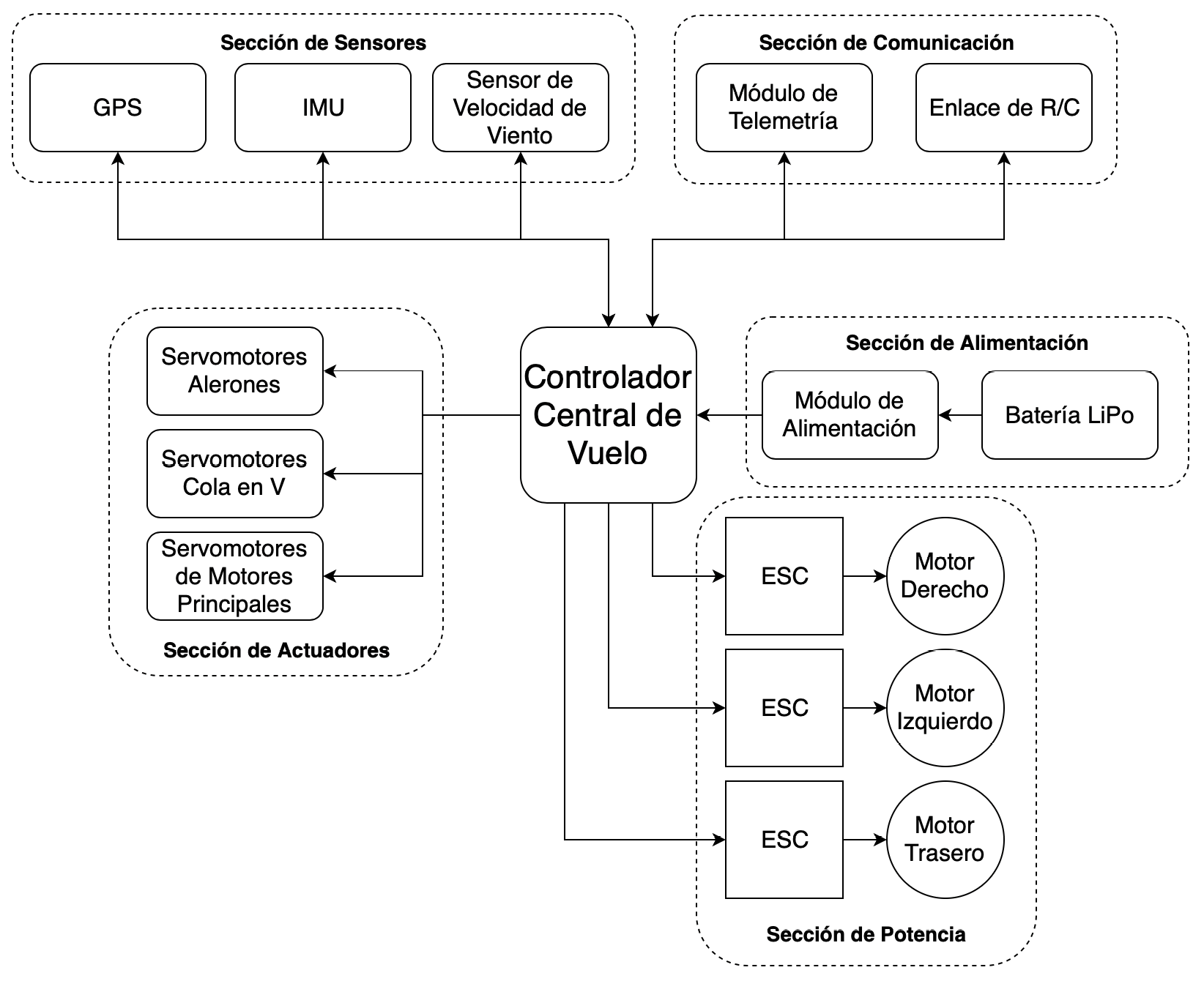
Figura 1. Diagrama de interconexión de bloques del diseño de la plataforma VTOL.
Controlador de vuelo
El controlador de vuelo es la unidad central de procesamiento de la aeronave, encargada de manejar cada uno de los componentes, entre ellos leer e interpretar los datos obtenidos de los periféricos (sensores) y tomar acciones mediante los actuadores (servomotores y motores). El controlador Pixhawk 2 [8] se comunica con los periféricos mediante diferentes protocolos de comunicación, como I2C (para el el sensor de velocidad de viento), UART (para el receptor GPS y la telemetría) y SPI (para el IMU). Y para los actuadores se comunica mediante señales de modulación por ancho de pulso (PWM). Es importante destacar que este controlador tiene la capacidad de realizar misiones autónomas, las cuales se puede programar desde el software de control asociado, llamado Mission Planner.
Sección de sensores
Los sensores son la forma en que el controlador puede estar consciente del entorno a la hora de volar. Los sensores que se utilizan en la plataforma son el receptor para el sistema de posicionamiento global (GPS), modelo Here de la marca Hex [9]; la unidad de medición inercial (IMU), que incluye un acelerómetro LSM303 [10], un giroscopio L3GD20 [11] y un barómetro MS5611 [12], y que vienen incorporados dentro del con trolador Pixhawx 2; y el sensor de velocidad de viento, modelo MS5525 [13]. Estos le brindan al controlador información de orientación, posición y sustentación de la aeronave durante la ejecución de una misión.
Sección de actuadores
Los movimientos para controlar el desplazamiento de la aeronave en modo de ala fija se realizan mediante servomotores. Las partes móviles de la plataforma son los alerones, tanto los de las alas como los de la cola, y además los servomotores que realizan un movimiento de 90 grados para la transición de los motores en las alas entre el modo multirrotor y el modo de ala fija y viceversa. Se utiliza servomotores EMAX ES3004 [14] para los alerones de las alas y la cola, los cuales presentan un torque de estancamiento (Stall torque) máximo de 3.5 kg×cm; para los servomotores de las alas se utilizó el modelo RDS3115 [15] que cuenta con un torque de estancamiento de 15 kg×cm.
Sección de comunicación
Para la operación de la aeronave, se debe establecer enlaces de comunicación entre el controlador de la aeronave y una estación en tierra (Ground Control Station, GCS), y entre el controlador de la aeronave y el control remoto. Ambos enlaces tienen diferente propósito y forma de comunicarse. Para la comunicación entre la aeronave y el control remoto se utiliza un enlace de 2.4 GHz con una modulación PPM de ocho canales entre el emisor y el receptor, utilizando el modelo de transceptor D4R-II de FrySky[16] y el control remoto modelo FS-TH9X [17]. Entre el control remoto y el controlador a bordo se intercambian comandos para controlar los alerones, transición, velocidad de motores; además, se pueden monitorizar algunas señales según la configuración deseada. Para el caso del enlace de telemetría, este permite intercambiar información entre el software en la GCS y el controlador a bordo, para por ejemplo definir la secuencia de comandos para mover los alerones y controlar la potencia aplicada para seguir una trayectoria predefinida. Además, se puede obtener información de sensores, las condiciones de orientación (posición tridimensional, velocidad) y estado general del controlador de vuelo de la aeronave. Este enlace se realiza mediante un enlace a 433 MHz, el cual es una banda libre aficionada en Costa Rica [18].
Sección de potencia
Los motores que se utilizan para aplicaciones de plataformas no tripuladas son principalmente los motores sin escobillas, los cuales tienen una alta eficiencia en el consumo de energía, pero un costo más elevado. Para que una aeronave pueda elevarse con normalidad, es necesario tener un empuje total de los motores que sea al menos el doble del peso total de la aeronave. También es de importancia conocer la constante KV del motor, la cual indica una aproximación de las revoluciones por minuto del motor por Voltio aplicado. Los motores utilizados para la plataforma tienen 12 polos con una constante KV = 520 para los motores de las alas y KV = 400 para el motor de la cola.
Sección de alimentación
Esta sección se encarga de proporcionar energía a todos los componentes de la plataforma; para ello se utilizan baterías tipo LiPo (Polímero de Litio), que presentan un peso adecuado y una buena tasa de descarga (XC). Este tipo de batería ofrece un balance positivo para la relación peso/potencia, comparado con otros tipos de baterías como las de NiMH, por ejemplo [19]. Para el caso de la plataforma VTOL desarrollada, se utilizó una batería LiPo de 6 celdas, con capacidad (C) de 8000 mAh, con la que se fija una tensión nominal de 22.2 V. La capacidad de la batería es importante para el correcto funcionamiento de los motores, ya que estos demandan gran cantidad de potencia para el despegue y aterrizaje de la plataforma en modo multirrotor. La tasa de descarga permitida para una batería se mide en múltiplos de su capacidad nominal (XC) e indica la corriente máxima que la batería puede entregar. Para la batería utilizada se tiene un valor de 10C, que indica que la batería puede entregar una corriente máxima de 10*8000 mAh = 80 A.
Implementación y Validación de la Plataforma VTOL
A continuación se muestra la implementación de la plataforma VTOL, la cual se realizó utilizando un fuselaje de un Nimbus 1800 [20], originalmente una estructura para ala fija que fue adaptada. La integración final de la plataforma se muestra en la figura 2.
Al fuselaje se le agregó el control electrónico, los motores, los servomotores, el receptor GPS, el Pitot y se desarrollaron varias piezas en impresión 2D/3D: soportes para la cola y el motor trasero; además, se creó una base para poder colocar el controlador de vuelo, Pixhawk 2, como se muestra en la figura 3.

Figura 2. Plataforma VTOL de ala fija implementada.
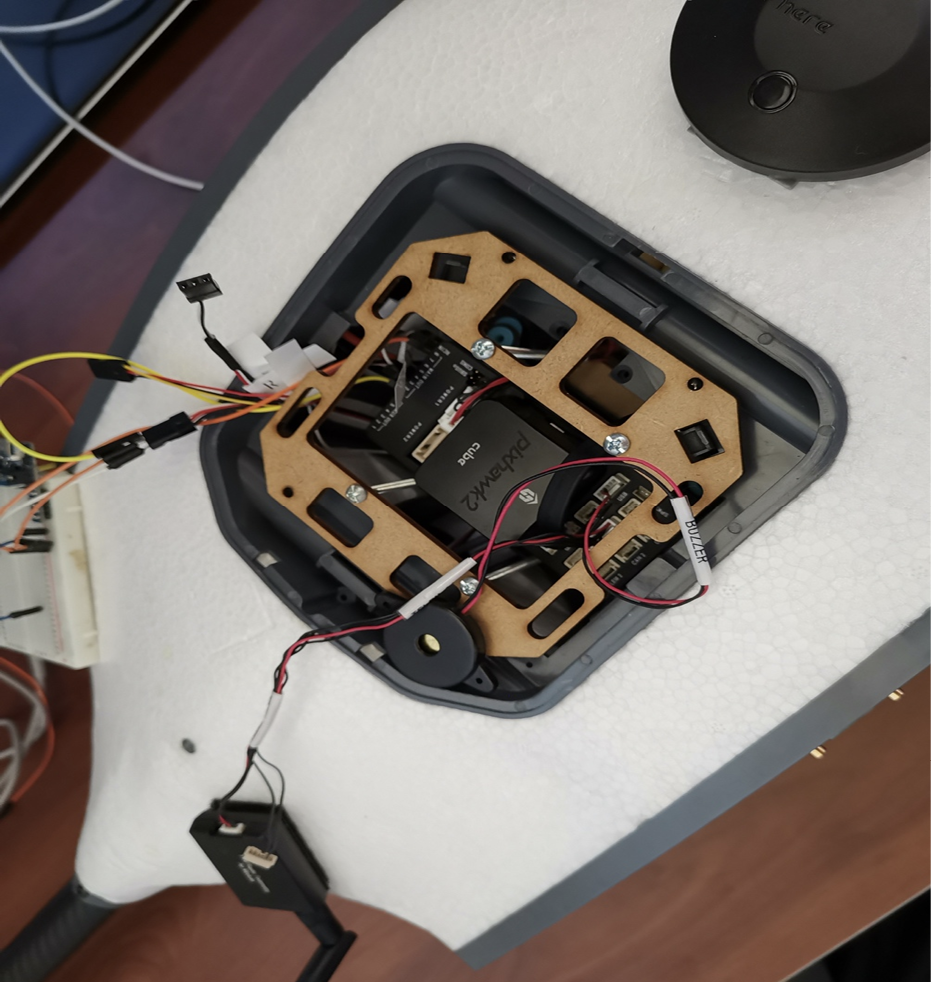
Figura 3. Controlador de Vuelo, Pixhawk 2, fijado dentro del fuselaje de la plataforma.
Posteriormente se realizó la programación del controlador mediante el software Mission Planner [21], con el cual se instala el firmware ArduPlane [22] y se programa el controlador. Para programar el controlador de vuelo, se modifican los parámetros que controlan diferentes aspectos que controlan el funcionamiento de la plataforma, desde la estructura en términos de cantidad y configuración de los motores, hasta tasas de ascenso, descenso, ajustes del control de estabilidad de la aeronave, ajuste de los servomotores, entre otros. Algunos de los parámetros más importantes para la plataforma se encuentran resumidos en el cuadro 1.
Cuadro 1. Parámetros de configuración principales de la plataforma VTOL en Mission Planer.
|
Parámetro |
Valor |
Descripción |
|
Q_ENABLE |
1 |
Habilita moto QuadPlane |
|
Q_FRAME_CLASS |
7 |
Frame: Tricopter (3 Motores) |
|
Q_FRAME_TYPE |
1 |
Orientación de Motores: X |
|
Q_TILT_TYPE |
2 |
Yaw de forma Vectorial |
Una vez consolidada la plataforma, se realizaron diferentes pruebas, primero a nivel de subsistemas dentro del Laboratorio, y posteriormente en campo con pruebas manuales y autónomas (figura 4) en misiones fotogramétricas programadas, para un total de 14 pruebas de campo.
A continuación, se muestran los resultados de una de las misiones autónomas. En esta misión se cubrió un área aproximada de 30 hectáreas de terreno, que corresponden al sector este del campus tecnológico central del ITCR en Cartago con una duración aproximada de nueve minutos y medio, con un consumo de un 40% de una batería LiPo 6S de 8000 mAh. El plan de vuelo se describe en la Figura 5, que consistió en un sobrevuelo a 100 metros de altitud, con una separación entre líneas de 40 metros y un traslape vertical y horizontal del 80%. Se aplicó el salto de dos líneas como forma de vuelo para conformar la ruta, con el fin de tener suficiente flexibilidad espacial para realizar virajes más amplios y de esta forma no exigir a la plataforma realizar virajes muy abruptos, los cuales pueden ser peligroso por la inestabilidad inducida. Con este acercamiento se logra conservar la separación de líneas fijada sin mayores problemas.

Figura 4. Despegue de la plataforma VTOL en misión autónoma.
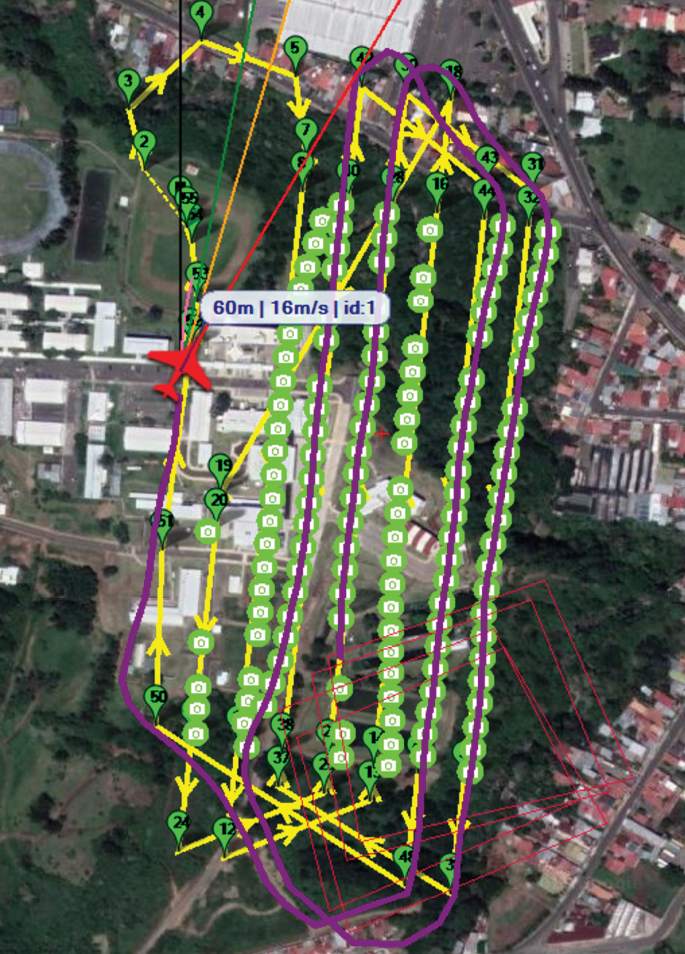
Figura 5. Plan de vuelo y misión ejecutada por plataforma VTOL.
Para el caso de la misión mostrada en la figura 5, la aeronave estuvo expuesta a viento cruzado, ya que la trayectoria era de norte-sur, pero el viento estaba en dirección oeste-este. Por esta razón se observa que la nariz apunta ligeramente en dirección al viento, para compensar el arrastre.
Se utilizó para la toma de imágenes una cámara Sony A5100 adaptada para uso en UAS (sin interfaz humana), de 24 megapíxeles y un lente de 16 mm, con la cual se obtuvieron 157 imágenes para el análisis fotogramétrico. Mediante el software Agisoft Metashape 1.5.3 [23] se realizó el procesamiento de las imágenes y se logró verificar que la calidad de las imágenes es superior a 0.6. Este factor es evaluado por el software de fotogrametría, e indica la nitidez de las imágenes, en un rango entre cero y uno, requiriéndose normalmente valores sobre el umbral de 0.6 para lograr una alineación exitosa de las imágenes.
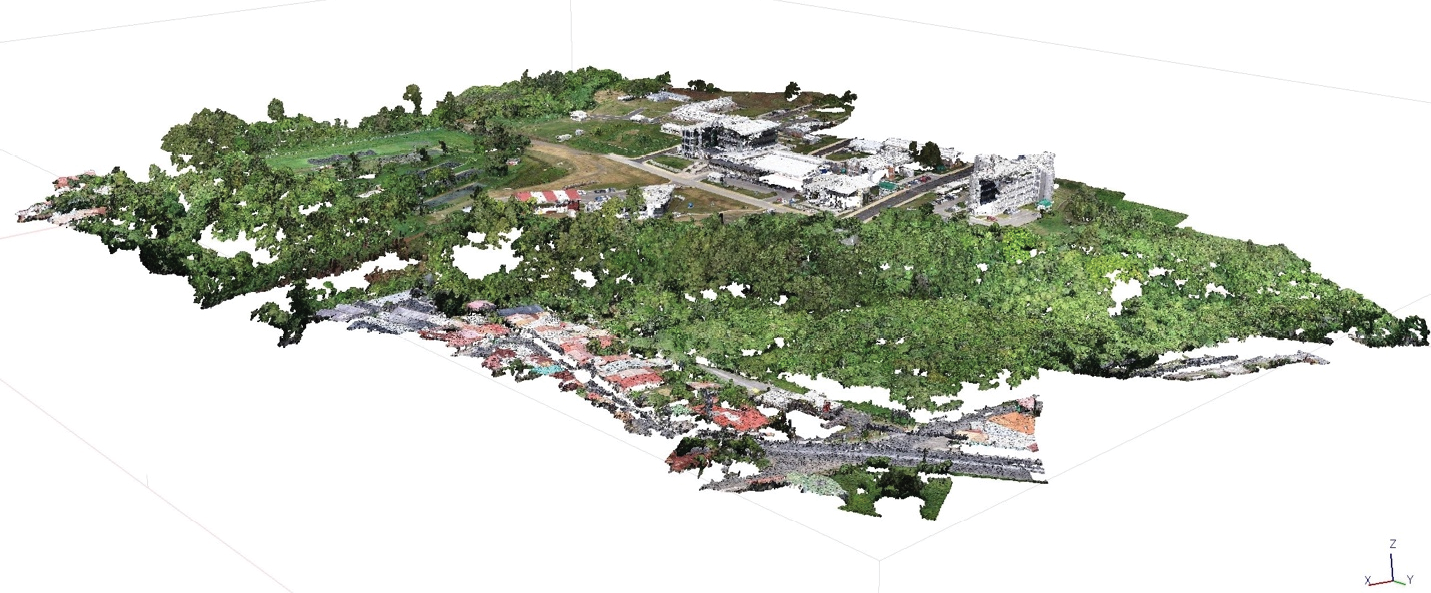
Figura 6. Nube densa de puntos generada en Agisoft Metashape. (524 896 075 puntos).
La alineación de las imágenes se realiza con el programa de procesamiento, y está basado en algoritmos de visión por computadora tales como el SfM (Structure from Motion) [24] - [27] y el SIFT (Scale-Invariant Feature Transform) [26], que buscan encontrar puntos clave y puntos coincidentes entre el conjunto de imágenes. Este procedimiento genera la proyección de los puntos en un espacio tridimensional para conformar la nube de puntos dispersa de aproximadamente 160 000 puntos.
La nube densa de puntos se genera a partir de la nube dispersa, la cual consiste en un modelo tridimensional detallado del terreno sobrevolado, como se ilustra en la figura 6. Esta nube típicamente se genera con algoritmos MVS (Multi View Stereo) [27], el cual busca distinguir e inferir diferentes puntos de vista de diferentes imágenes respecto a un punto en común entre las fotografías. A partir de los píxeles coincidentes de las imágenes en 2D para conformar la nube dispersa, se busca interpolar la posición correspondiente de otros puntos y así crear un espacio tridimensional con mayor cantidad de información. En este caso, la nube de puntos densa tuvo un total de 524 896 075 puntos.
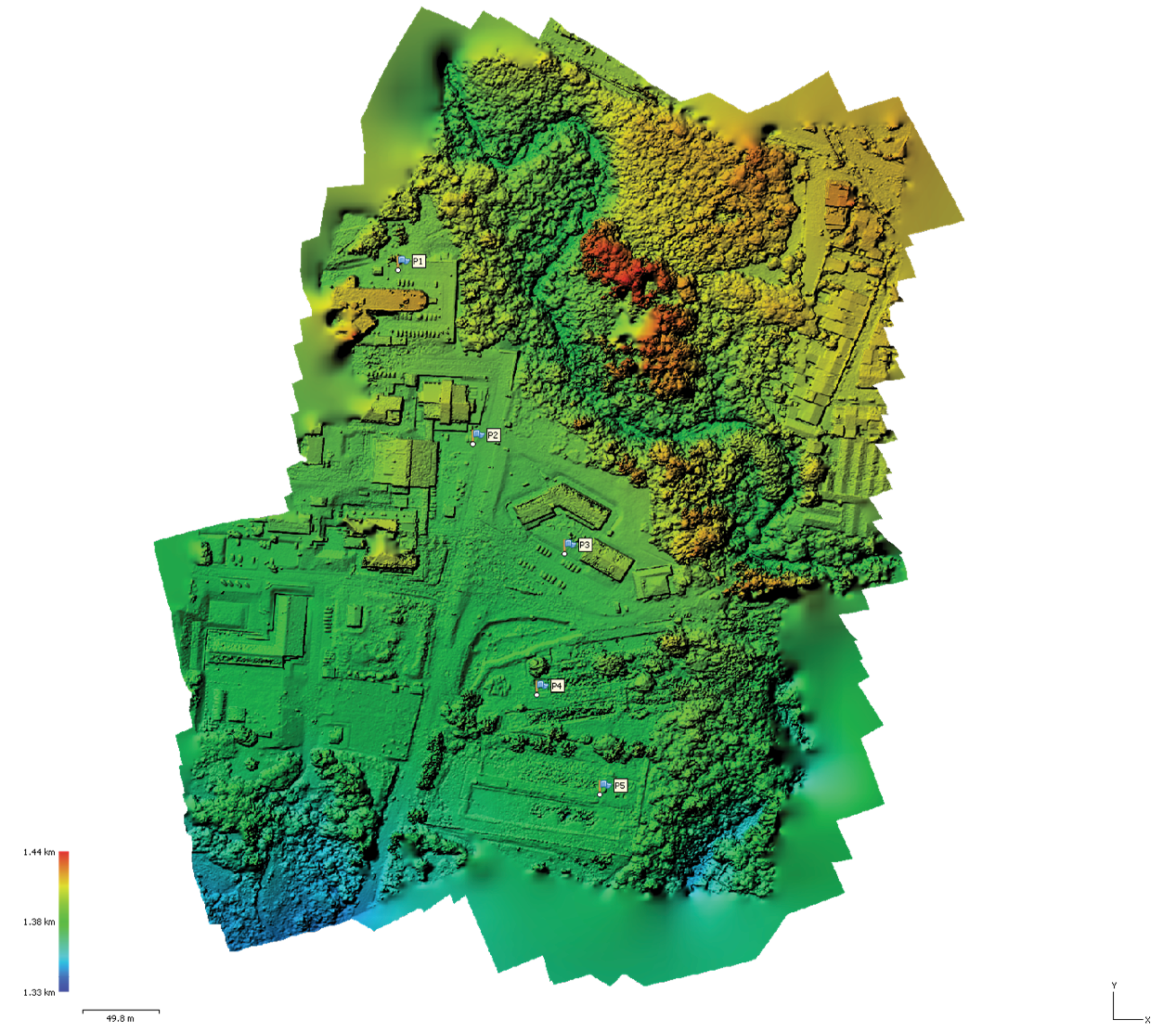
Figura 7. Modelo digital de elevación (DEM) generado mediante Agisoft Metashape. Resolución: 2.8 cm/píxel.
Finalmente, se generan los productos fotogramétricos a partir de la nube densa y el modelo mallado, por ejemplo, modelos digitales de elevación (DEM) u ortomosaicos. Para la zona en estudio, el DEM se muestra en la figura 7, donde se observa el relieve del área sobrevolada, donde la escala de altitud varía de 1330 msnm (en azul) a 1440 msnm. Se utilizaron 5 puntos de referencia geográficos (Ground Control Points, GCPs) y se alcanzó una resolución espacial de 2.8 cm/pixel, con errores RMS en las componentes X, Y , Z de los GCP inferiores a 2.03 cm. Se utilizó un sistema de proyección CRTM-05 con Datum WGS-84.
Conclusiones y Recomendaciones
En este artículo se describió el desarrollo de un UAS del tipo VTOL y se demostró que la plataforma es capaz de ejecutar misiones fotogramétricas programadas de forma autónoma. Se logró programar misiones de vuelo, de las que se obtuvieron procesamientos fotogramétricos de buena calidad y alta resolución (2.8 cm/pixel). El factor de calidad obtenido de las imágenes fue superior a 0.7, para la escala del programa de Agisoft Metashape, y se logró alinear el 100 % de las imágenes.
Trabajo a futuro debe depurar las metodologías para toma de datos, protocolos de seguridad, así como extender el trabajo para poder integrar diversos sensores de imagen, tanto en el área visible como en bandas no visibles.
Referencias
[1] The American Society for Photogrammetry and Remote Sensing, “What is ASPRS?” Obtenido de: https://www.asprs.org/organization/what-is-asprs.html
[2] E. Gutierrez-Leiva, “Desarrollo de plataforma UAS para aplicaciones de fotogrametría”, Proyecto Final para optar por el grado de Licenciatura en Ingeniería Electrónica, Instituto Tecnológico de Costa Rica (ITCR), Cartago, 2017.
[3] E. Gutierrez-Leiva. Sergio, S. Arriola-Valverde, L. A. Chavarria-Zamora y R. Rimolo-Donadio, “Desarrollo de una Plataforma de Ala Fija para aplicaciones en Fotogrametría”, Tecnología en marcha, vol. 31, nº 4, pp. 133-141, 2018.
[4] A. Ferencz-Appel, “Methodology For The Generation of Autonomous Photogrammetric Missions with fixed-wing UAS Platforms”, Proyecto Final para optar por el grado de Licenciatura en Ingeniería Electrónica, Instituto Tecnológico de Costa Rica (ITCR), 2019.
[5] A. Ferencz-Appel, H. García de Marina, S. Arriola-Valverde, R. Rimolo-Donadio, “Metodología para la Implementación de Misiones Fotogramétricas Autónomas con Plataformas UAS de Ala Fija. Tecnología en marcha, artículo enviado, 2019.
[6] N. Chinchilla Bravo, “Observe desde el aire el campus del TEC en alta resolución.” Obtenido de: https://www.tec.ac.cr/hoyeneltec/2019/01/31/observe-aire-campus-tec-alta-resolucion
[7] K. Lee Quirós. “Desarrollo de plataforma VTOL de ala fija para aplicaciones fotogramétricas,” Proyecto de Graduación de Licenciatura en Ingeniería Electrónica, Instituto Tecnológico de Costa Rica, Cartago, 2019.
[8] “Pixhawk 2.” [Disponible en línea, setiembre 2019]: https://docs.px4.io/v1.9.0/en/flight_controller/pixhawk-2.html
[9] “Here GNSS GPS – Hex Technology” [Disponible en línea, setiembre 2019]: http://www.hex.aero/?product=here-gnss
[10] “LSM303DLHC: Ultra-compact high-performance eCompass module: 3D accelerometer and 3D magnetometer.” [Disponible en línea, setiembre 2019]: https://www.st.com/resource/en/datasheet/DM00027543.pdf
[11] “L3GD20H: MEMS motion sensor: three-axis digital output gyroscope” [Disponible en línea, setiembre 2019]: https://www.st.com/resource/en/datasheet/l3gd20h.pdf
[12] “MS5611-01BA03: Barometric Pressure Sensor, with stainless steel cap” [Disponible en línea, setiembre 2019]: https://www.te.com/usa-en/product-CAT-BLPS0036.datasheet.pdf
[13] “MS5525: Digital Small Outline Pressure Sensor” [Disponible en línea, setiembre 2019]: https://www.te.com/usa-en/product-CAT-BLPS0003.datasheet.pdf
[14] “EMAX ES3004 Metal Gear Analog Servo For RC Airplane” [Disponible en línea, setiembre 2019]: https://www.aliexpress.com/item/32959450326.html
[15] “RDS3115 Metal Gear Digital Servo” [Disponible en línea, setiembre 2019]: https://www.autobotic.com.my/robot-servo-rds3115-metal-gear-digital-servo-180-degree
[16] “D4R-II Receiver - FrSky” [Disponible en línea, setiembre 2019]: https://www.frsky-rc.com/product/d4r-ii/
[17] “FS-TH9X Transmitter - Flysky” [Disponible en línea, setiembre 2019]: https://www.flysky-cn.com/fsth9x
[18] “Alcance no. 110, May 24, 2017”. [Disponible en línea, setiembre 2019]: https://www.imprentanacional.go.cr/pub/2017/05/24/ALCA110_24_05_2017.pdf
[19] J. Salt, “Getting the most out of your LiPo batteries,” [Disponible en línea, setiembre 2019]: https://www.rchelicopterfun.com/lipo-batteries.html
[20] “Nimbus 1800 Long Range RC FPV Plane.” [Disponible en línea, setiembre 2019]: https://www.foxtechfpv.com/nimbus-1800-fpv-plane-frame.html
[21] “Mission Planner – ArduPilot” [Disponible en línea, setiembre 2019]: http://ardupilot.org/planner/
[22] ArduPilot, “APM: Plane”. [Disponible en línea, setiembre 2019]: http://ardupilot.org/plane/index.html
[23] “Agisoft Metashape” [Disponible en línea, setiembre 2019]: https://www.agisoft.com/features/professional-edition/
[24] Humboldt State University. “Structure from Motion” [Disponible en línea, setiembre 2019]: http://gsp.humboldt.edu/OLM/Courses/GSP_216_Online/lesson8-2/SfM.html
[25] N. Micheletti, J. H. Chandler y S. Lane. “Structure from Motion (SfM) Photogrammetry” [Disponible en línea, setiembre 2019]: https://www.geomorphology.org.uk/sites/default/files/geom_tech_chapters/2.2.2_sfm.pdf
[26] E. Nissen, J. R. Arrowsmith y Chris Crosby. “Introduction to Structure-from-Motion” [Disponible en línea, setiembre 2019]: https://kb.unavco.org/kb/file.php?id=810
[27] Y. Furukawa y C. Hernández. “Multi-View Stereo: A Tutorial” [Disponible en línea, setiembre 2019]: http://carlos-hernandez.org/papers/fnt_mvs_2015.pdf
1 Escuela de Ingeniería Electrónica, Instituto Tecnológico de Costa Rica. Costa Rica. Correo electrónico: kleeq24@gmail.com
2 Escuela de Ingeniería Electrónica, Instituto Tecnológico de Costa Rica. Costa Rica. Correo electrónico: gabrielrodriguez@ieee.org
3 Escuela de Ingeniería Electrónica, Instituto Tecnológico de Costa Rica. Costa Rica. Correo electrónico: ferami3@gmail.com
4 Escuela de Ingeniería Electrónica, Instituto Tecnológico de Costa Rica. Costa Rica. Correo electrónico: sarriola@tec.ac.cr
5 Ticohobbies de Costa Rica. Costa Rica.
Correo electrónico: jorge@ticohobbies.com
6 Escuela de Ingeniería Electrónica, Instituto Tecnológico de Costa Rica. Costa Rica. Correo electrónico: rrimolo@tec.ac.cr